- 全部分类/
- 科学普及/
- 化工自动化及仪表

 扫码免费借阅
扫码免费借阅
目录
快速导航-
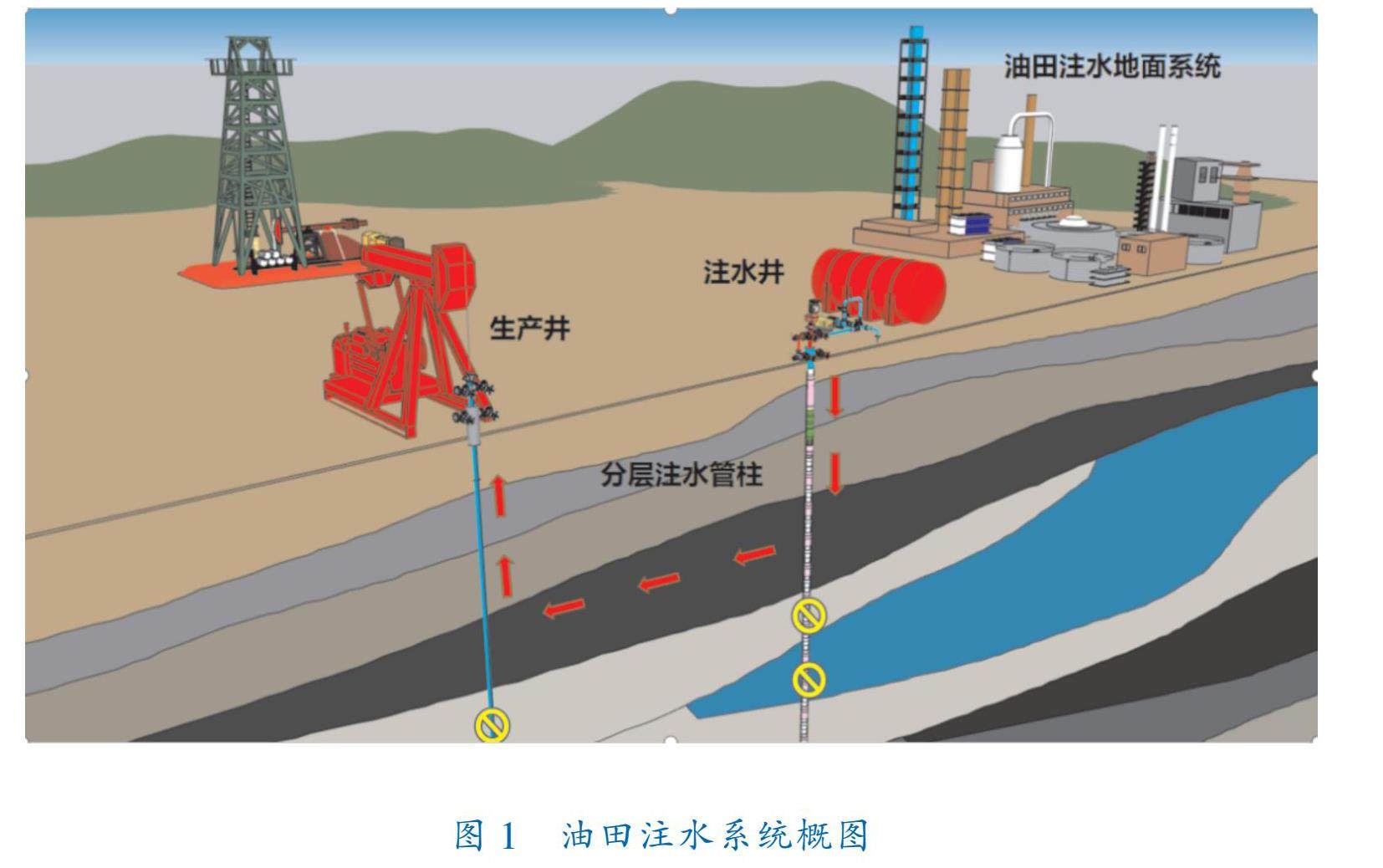
| 油田注水系统智能化关键技术研究进展
| 油田注水系统智能化关键技术研究进展
-
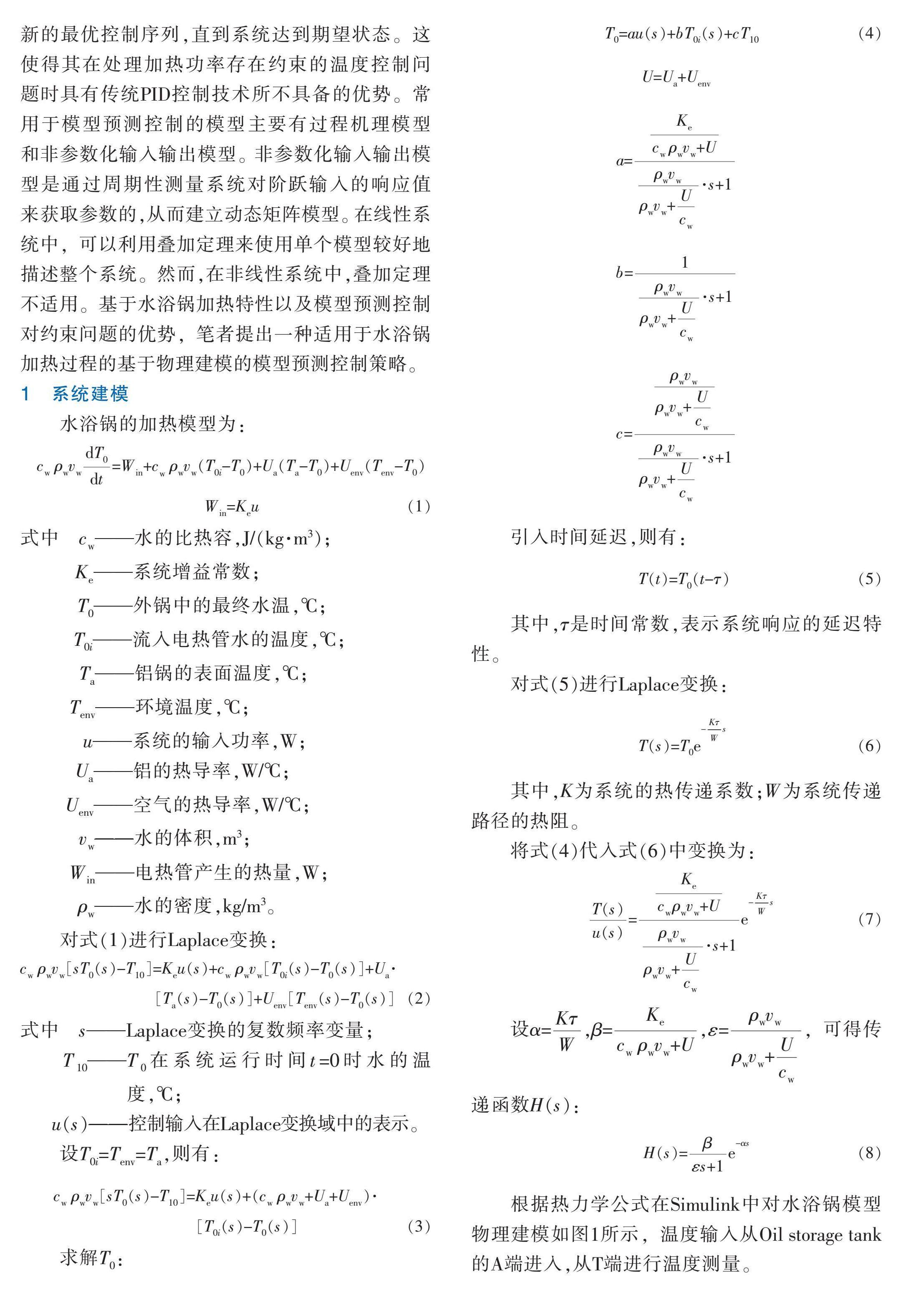
过程控制 | 基于模型预测控制的水浴锅温度控制策略
过程控制 | 基于模型预测控制的水浴锅温度控制策略
-
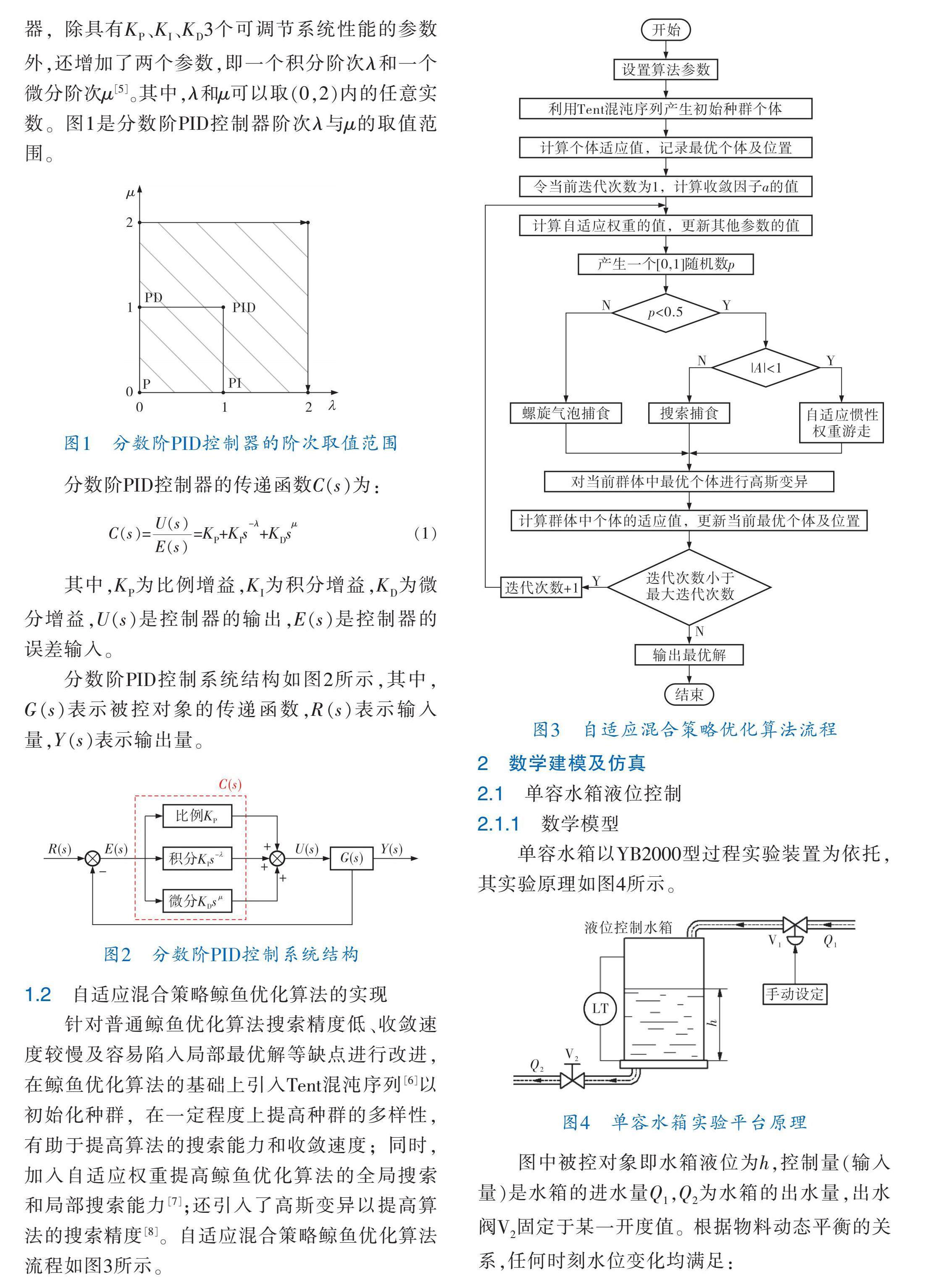
过程控制 | 基于自适应混合策略鲸鱼优化算法的分数阶PID控制器在液位控制中的研究
过程控制 | 基于自适应混合策略鲸鱼优化算法的分数阶PID控制器在液位控制中的研究
-
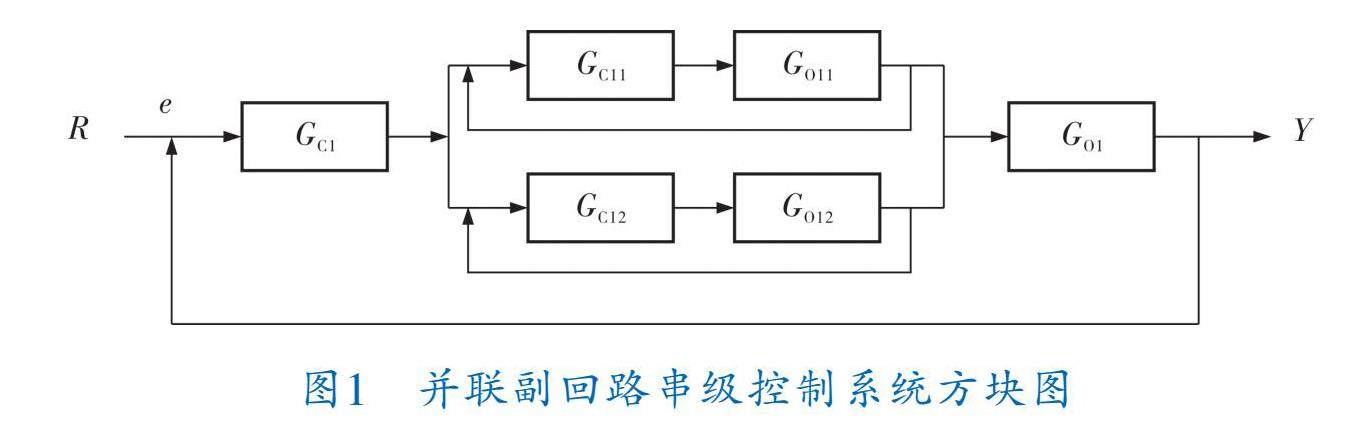
过程控制 | 并联副回路串级控制系统的稳态分析
过程控制 | 并联副回路串级控制系统的稳态分析
-
检测与仪表 | 基于比色测温的爆炸火球内窥式温度测量技术
检测与仪表 | 基于比色测温的爆炸火球内窥式温度测量技术
-
检测与仪表 | 延长油田井下分层注水流量计误差补偿方法
检测与仪表 | 延长油田井下分层注水流量计误差补偿方法
-
检测与仪表 | 石化行业循环水质氨氮浓度自动检测系统
检测与仪表 | 石化行业循环水质氨氮浓度自动检测系统
-
研究与应用 | 面向流程工业复杂生产过程经济运行的区域优化方法
研究与应用 | 面向流程工业复杂生产过程经济运行的区域优化方法
-
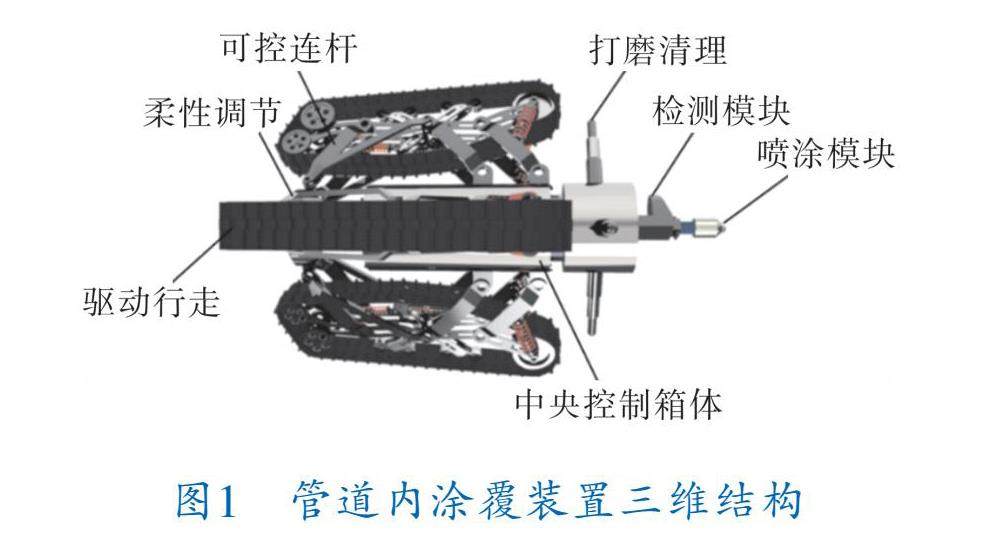
研究与应用 | 小直径一体化涂覆机器人控制系统设计
研究与应用 | 小直径一体化涂覆机器人控制系统设计
-

研究与应用 | 基于视觉纠偏的原油储罐浮船板焊接机器人研究
研究与应用 | 基于视觉纠偏的原油储罐浮船板焊接机器人研究
-
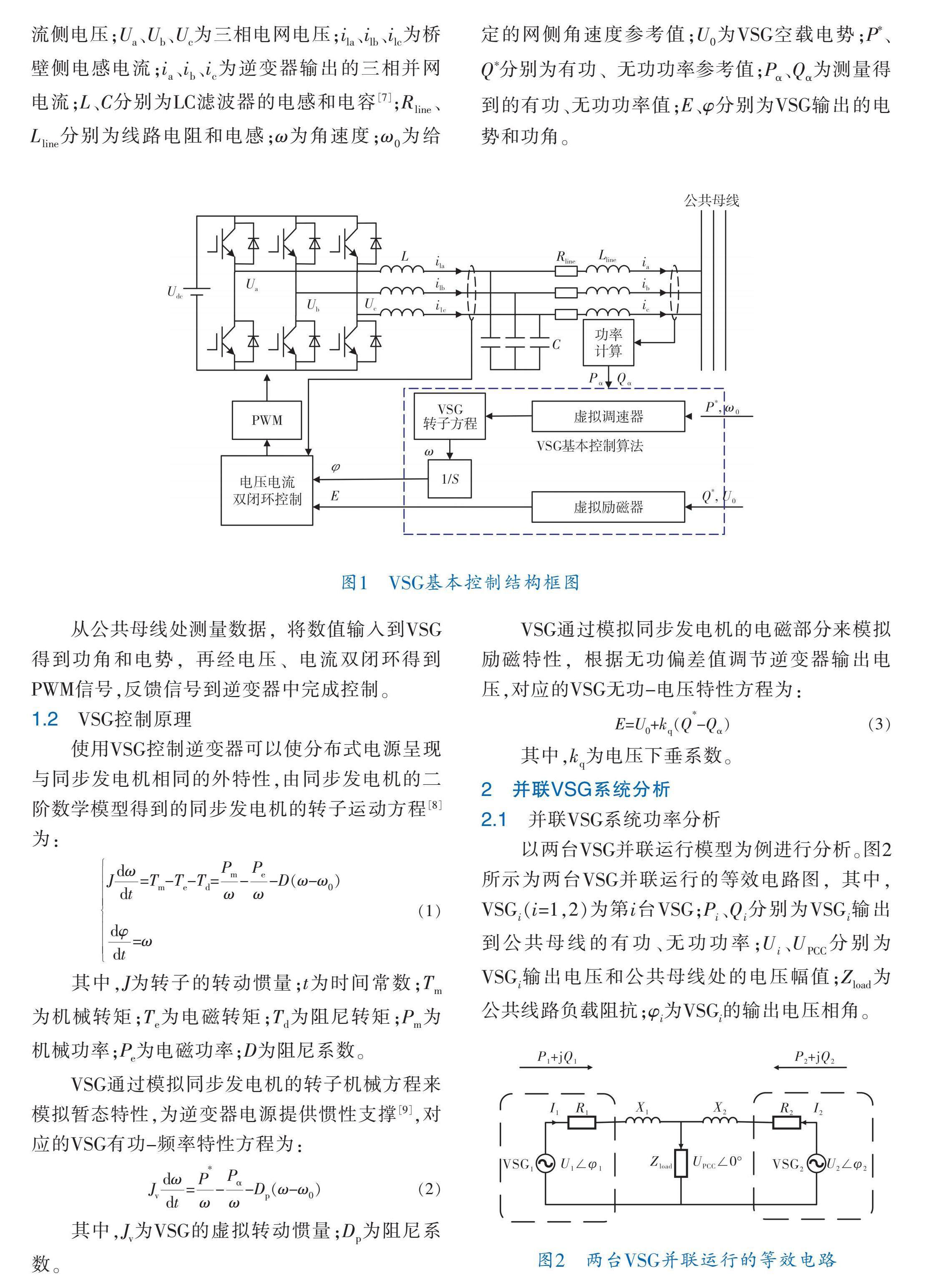
研究与应用 | 基于自适应虚拟阻抗的多VSG并联控制策略
研究与应用 | 基于自适应虚拟阻抗的多VSG并联控制策略
-
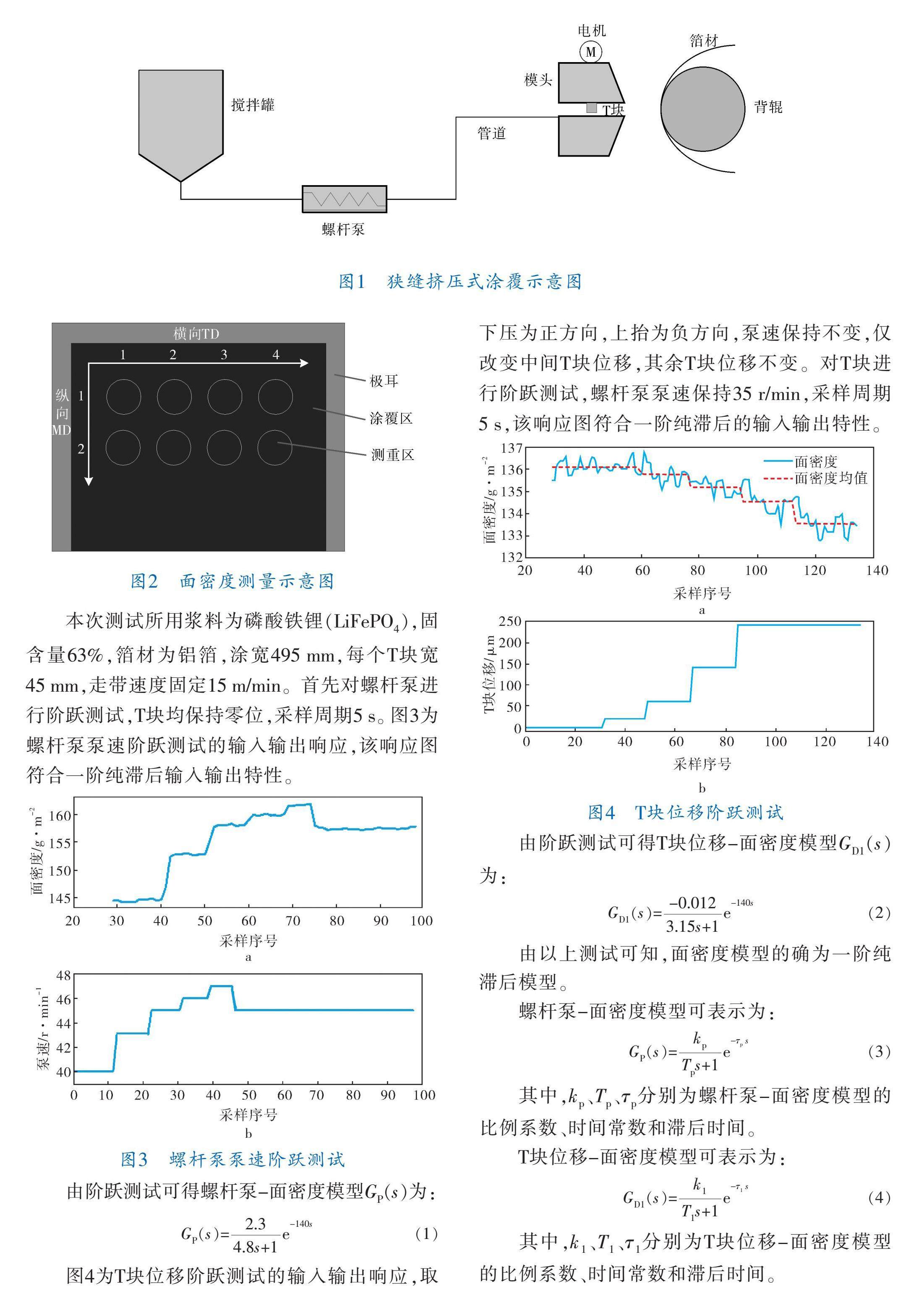
研究与应用 | 基于预测PI的电极面密度控制系统
研究与应用 | 基于预测PI的电极面密度控制系统
-
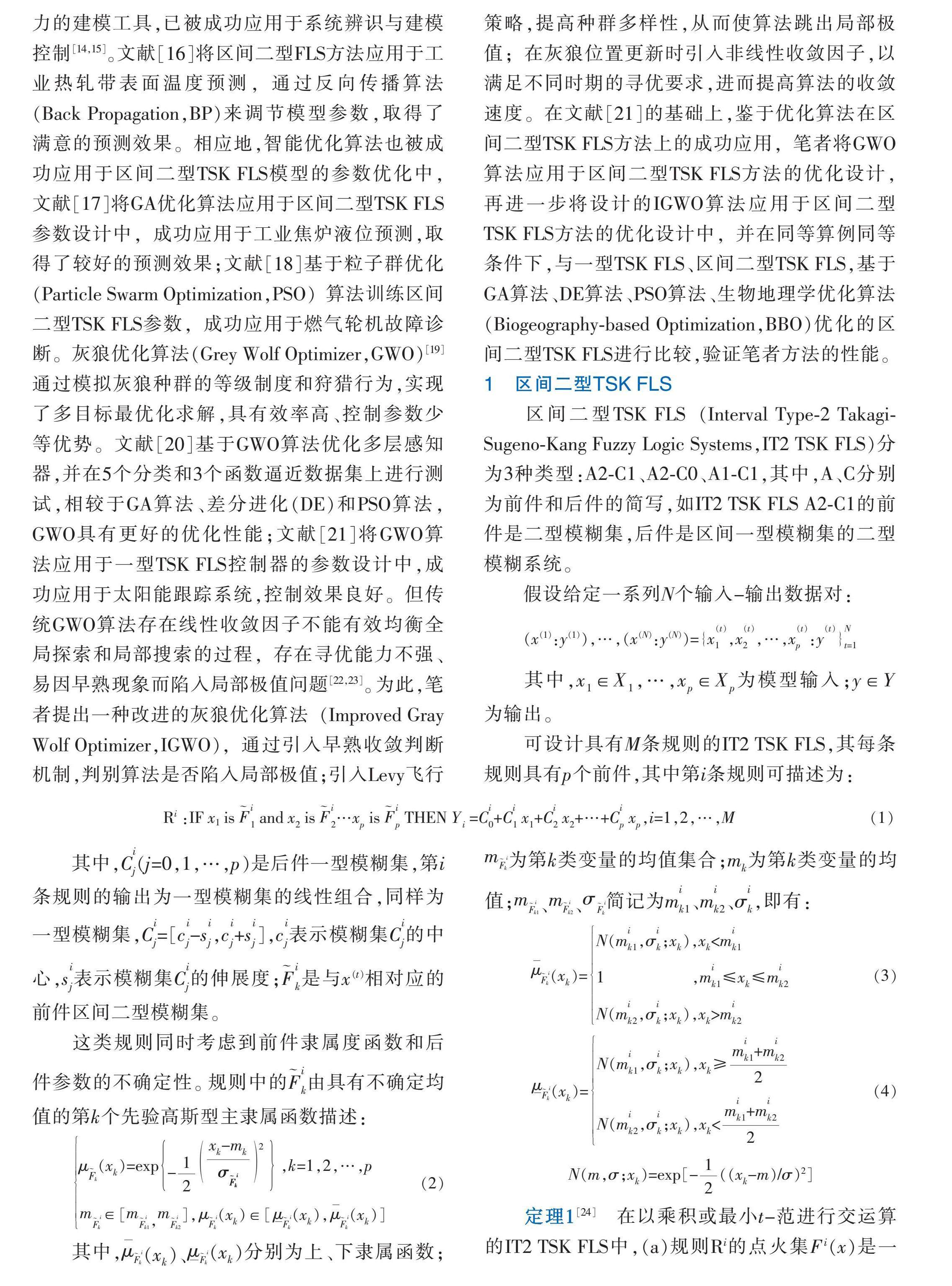
研究与应用 | 基于改进灰狼优化算法的区间二型TSK FLS方法在化工过程软测量中的应用
研究与应用 | 基于改进灰狼优化算法的区间二型TSK FLS方法在化工过程软测量中的应用
-
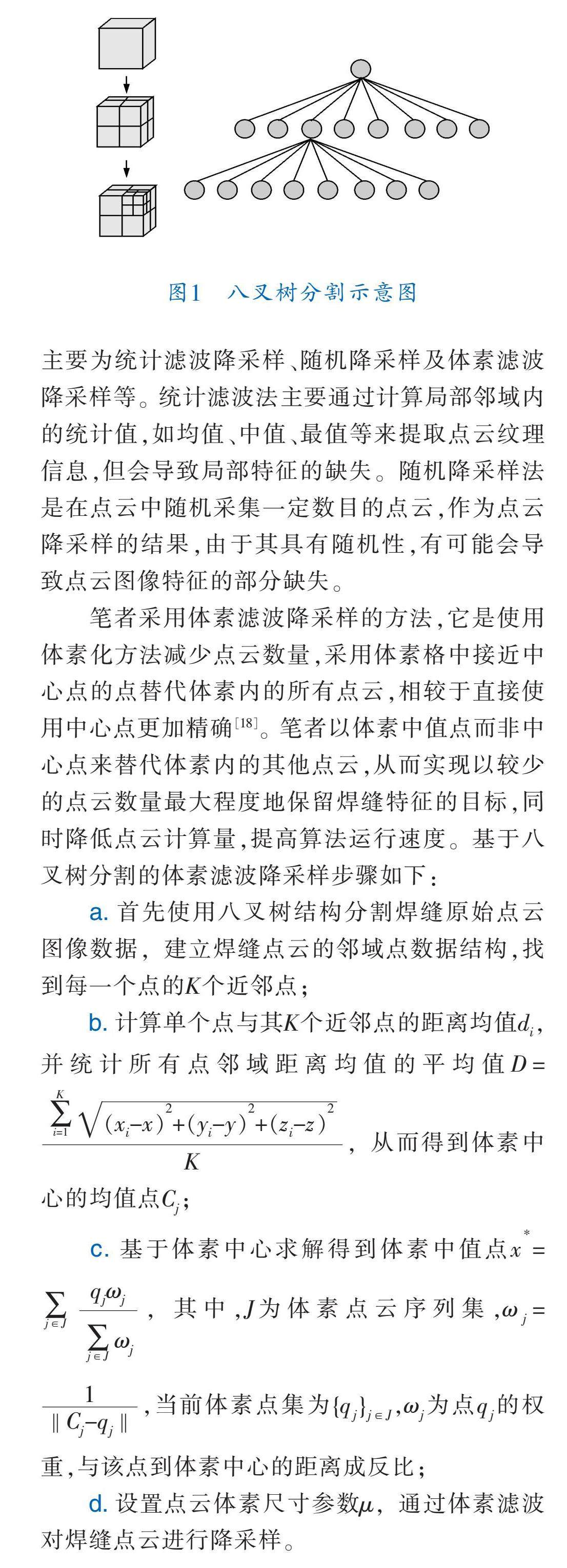
研究与应用 | 基于点云数据的改进型焊缝骨架提取算法
研究与应用 | 基于点云数据的改进型焊缝骨架提取算法
-
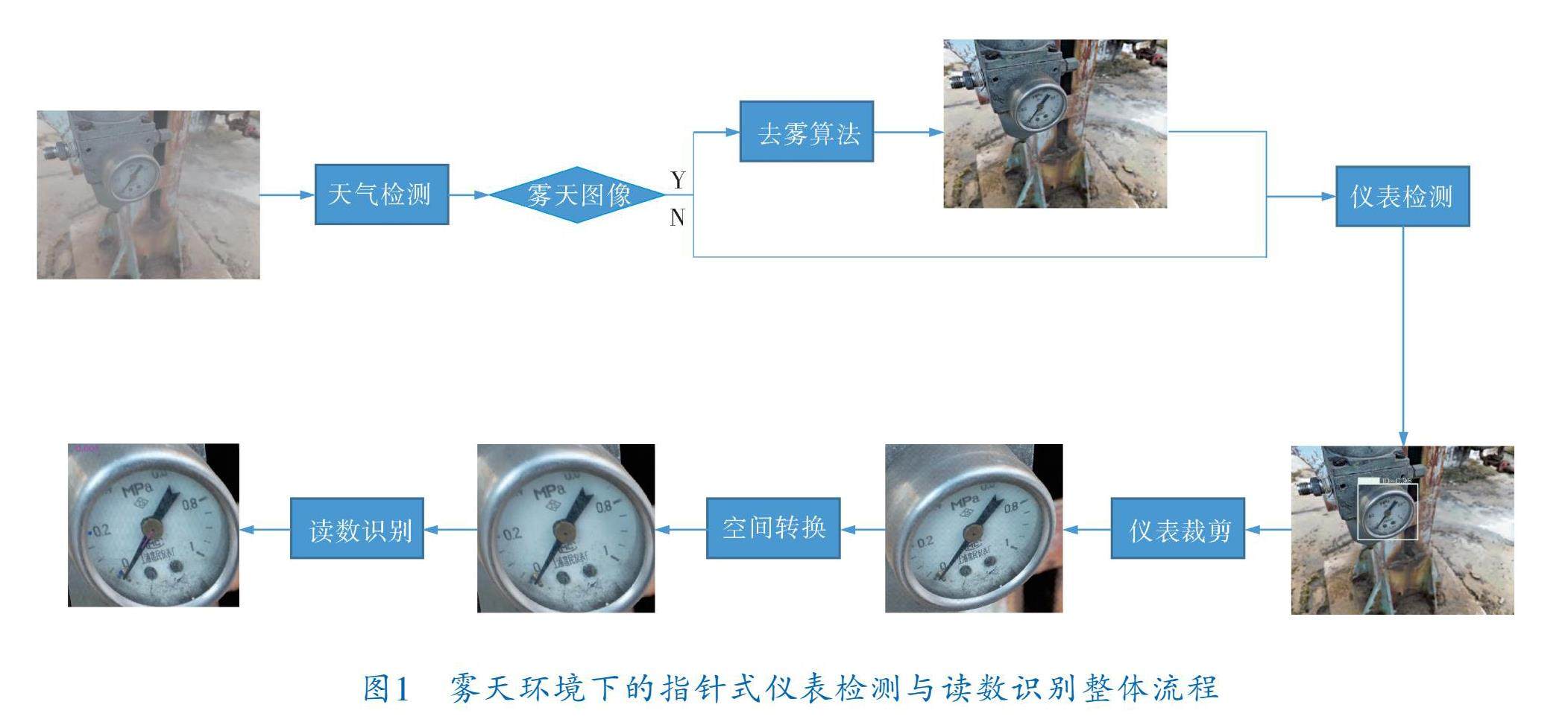
研究与应用 | 雾天环境下的指针式仪表检测与读数识别
研究与应用 | 雾天环境下的指针式仪表检测与读数识别
-

研究与应用 | 基于LGRSAE算法的非线性化工过程故障检测
研究与应用 | 基于LGRSAE算法的非线性化工过程故障检测
-
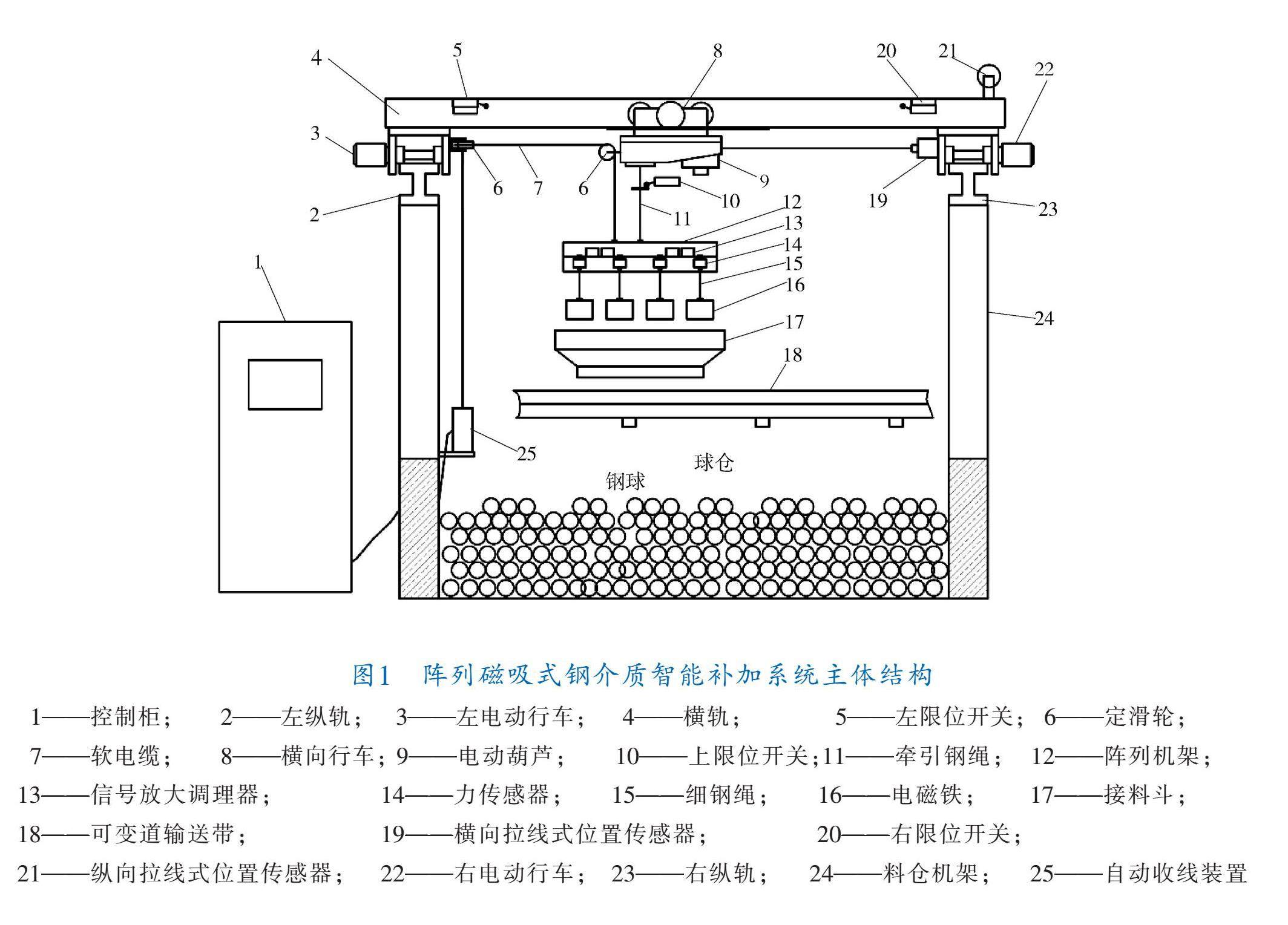
研究与应用 | 阵列磁吸式钢介质智能补加系统的研制
研究与应用 | 阵列磁吸式钢介质智能补加系统的研制
-
研究与应用 | 具有双陷波的超宽带滤波器设计
研究与应用 | 具有双陷波的超宽带滤波器设计
-
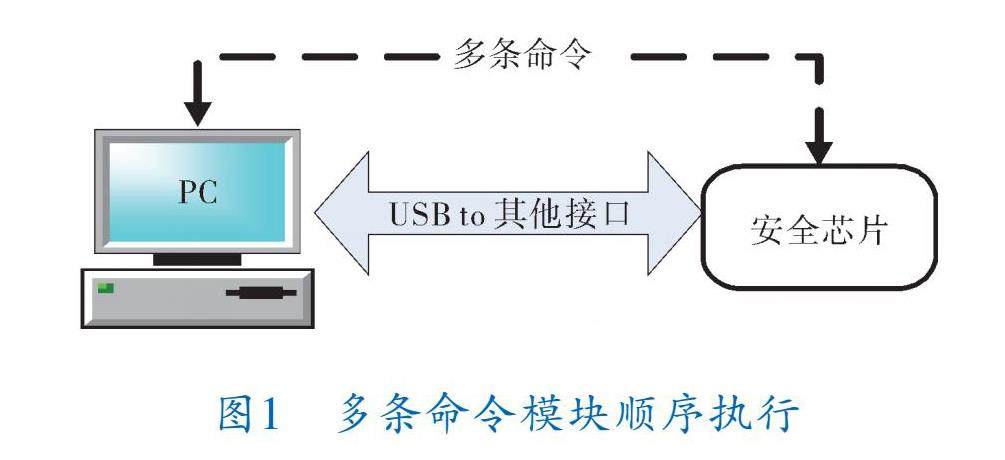
研究与应用 | 安全芯片多模块随机组合验证方法的设计与实现
研究与应用 | 安全芯片多模块随机组合验证方法的设计与实现
-
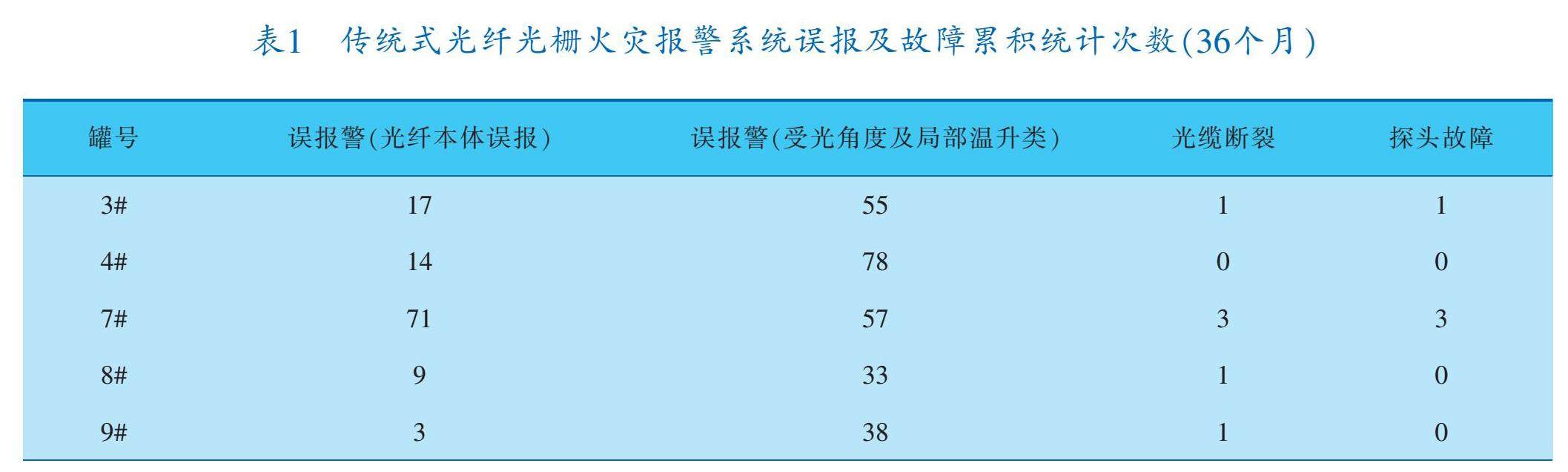
技改与创新 | 新型光栅阵列感温火灾报警系统在油库工程的研究及应用
技改与创新 | 新型光栅阵列感温火灾报警系统在油库工程的研究及应用
-
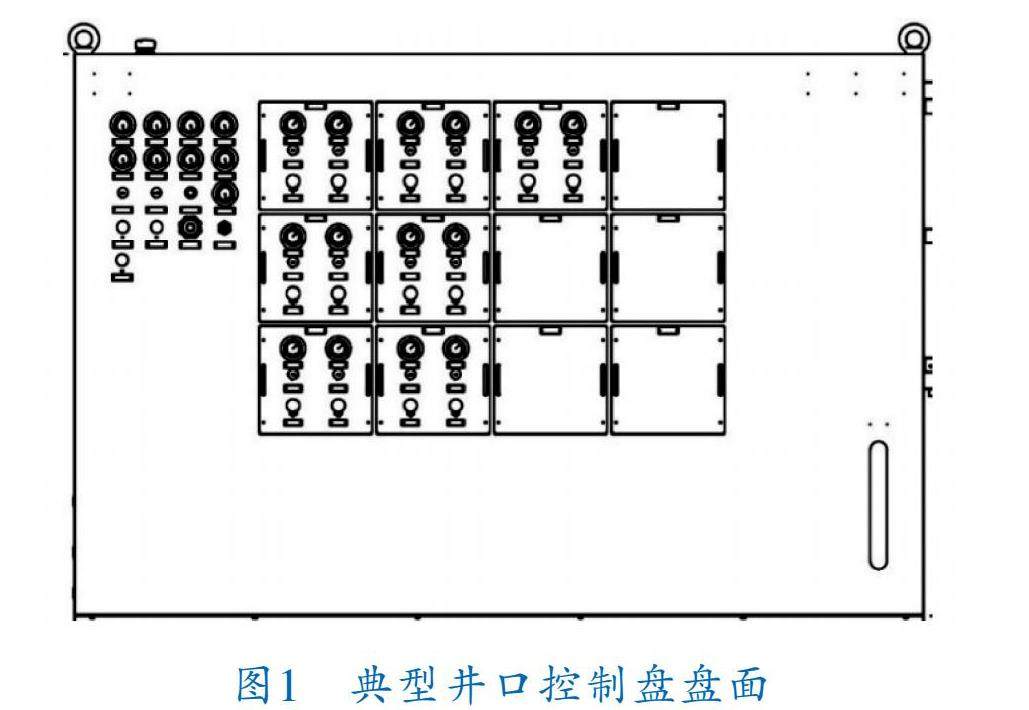
技改与创新 | 无人井口平台井口盘氮驱装置远程控制
技改与创新 | 无人井口平台井口盘氮驱装置远程控制
-
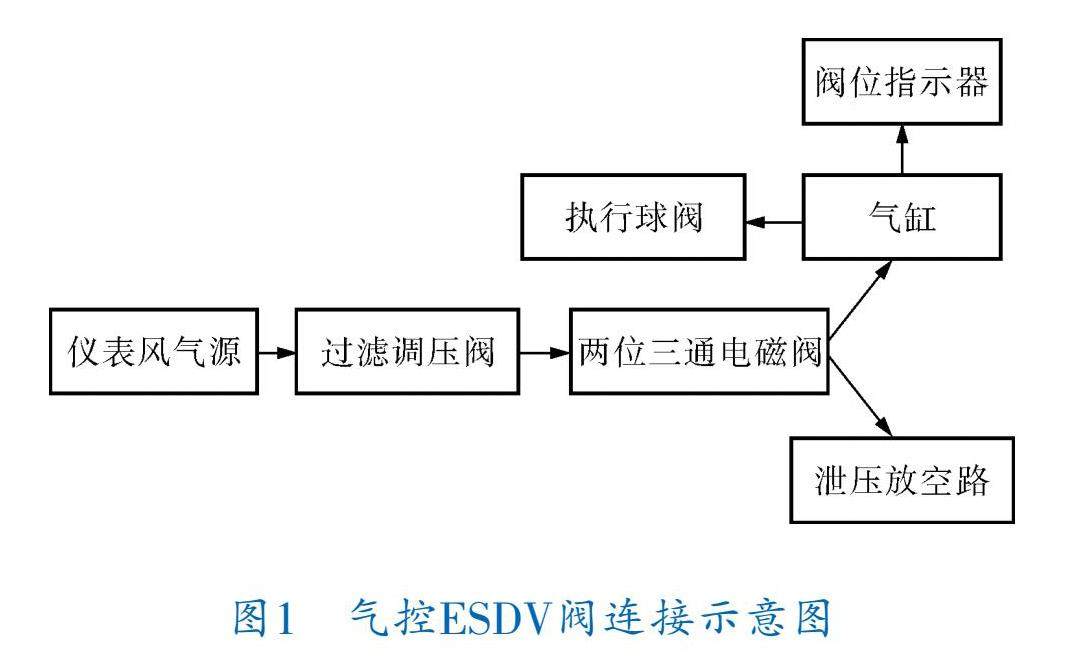
技改与创新 | 高含硫酸性气田关键自截阀门故障原因分析与优化
技改与创新 | 高含硫酸性气田关键自截阀门故障原因分析与优化









 登录
登录