
目录
快速导航-
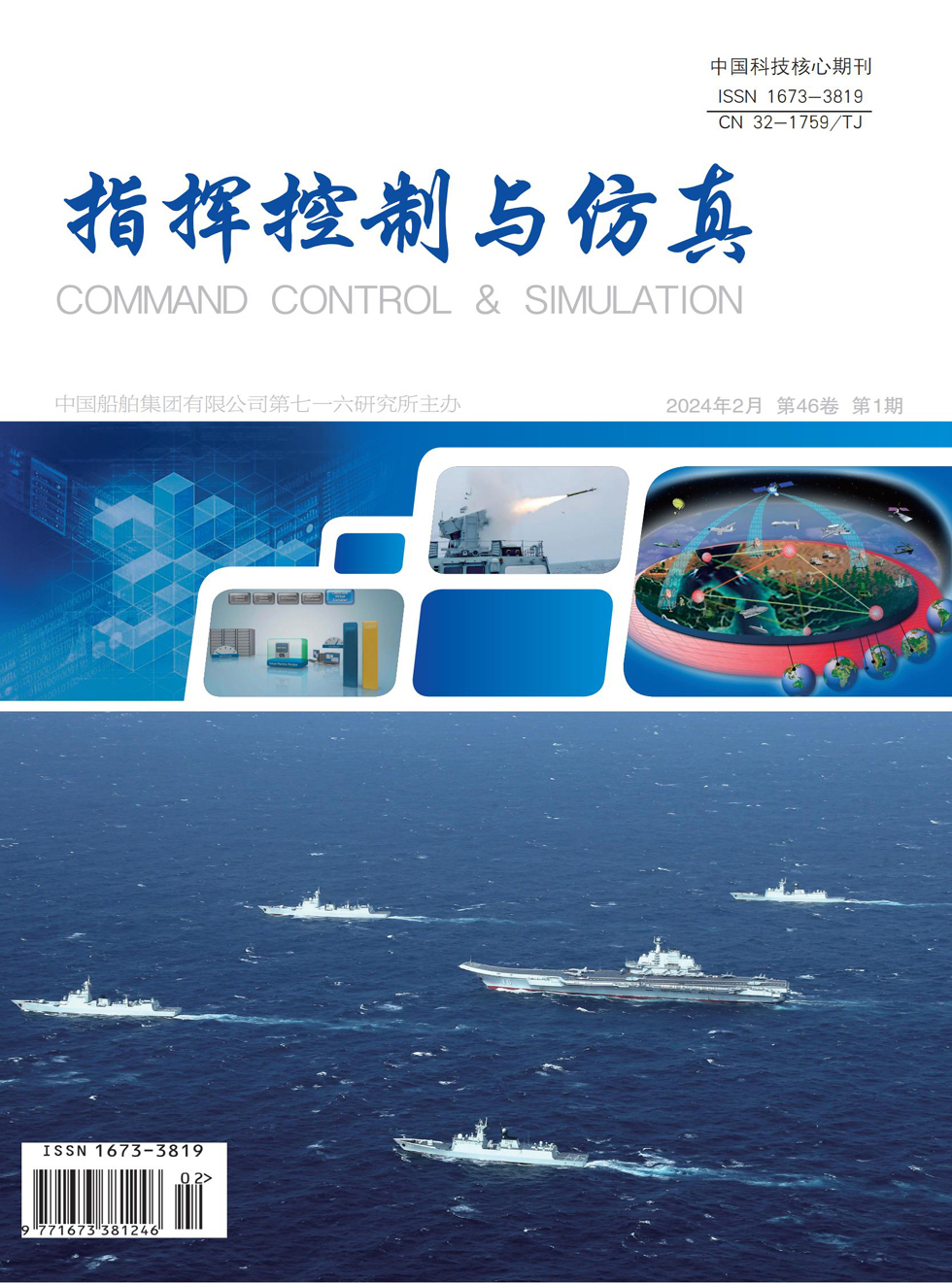
智能无人作战 | 无人机集群协同搜索研究综述
智能无人作战 | 无人机集群协同搜索研究综述
-
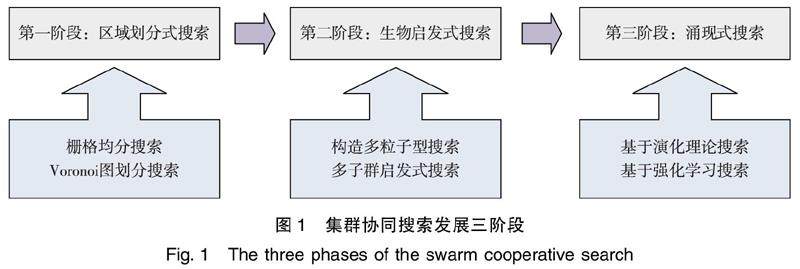
智能无人作战 | 面向电磁目标探测的无人机集群区域分割方法
智能无人作战 | 面向电磁目标探测的无人机集群区域分割方法
-
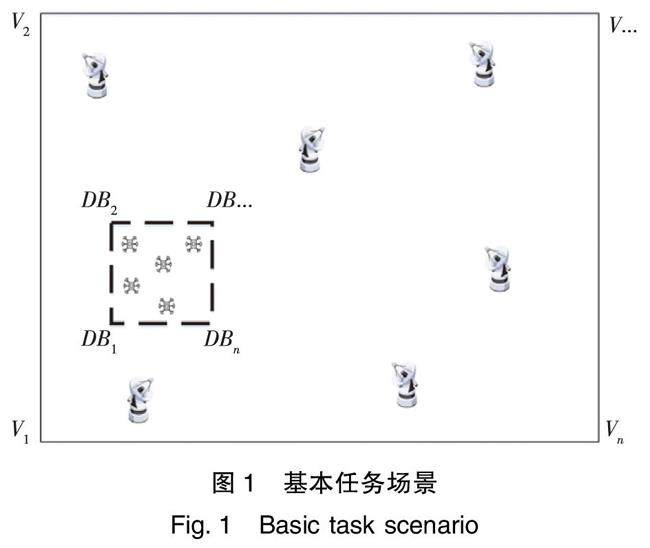
智能无人作战 | 基于细菌避障策略的无人艇集群自主巡航方法
智能无人作战 | 基于细菌避障策略的无人艇集群自主巡航方法
-

智能无人作战 | 外军有/无人编组技术分析
智能无人作战 | 外军有/无人编组技术分析
-

智能无人作战 | 基于航迹消除与策略迭代的无人机集群区域目标搜索方法
智能无人作战 | 基于航迹消除与策略迭代的无人机集群区域目标搜索方法
-
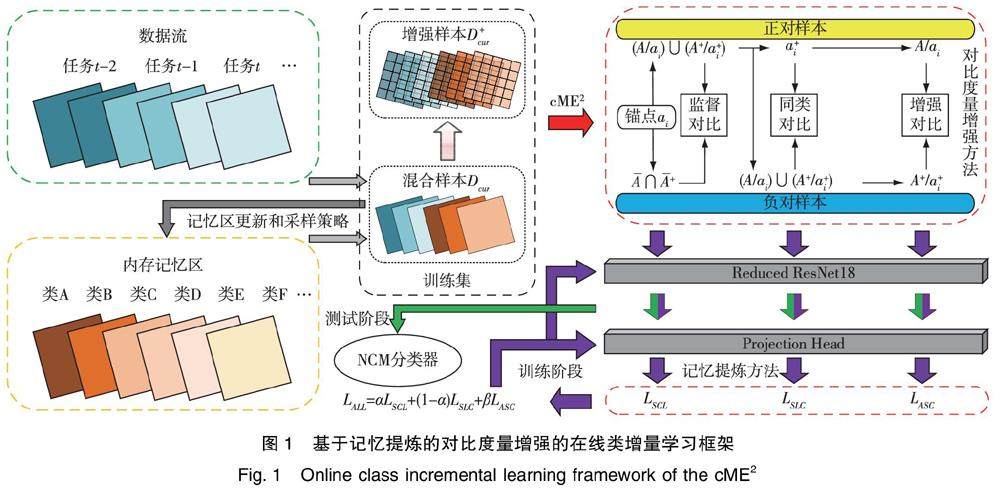
多模态信息融合 | 基于记忆提炼的对比度量增强在线类增量学习图像分类方法
多模态信息融合 | 基于记忆提炼的对比度量增强在线类增量学习图像分类方法
-
多模态信息融合 | 基于残差修正CNN-BiLSTM的空中目标航迹短期预测算法
多模态信息融合 | 基于残差修正CNN-BiLSTM的空中目标航迹短期预测算法
-
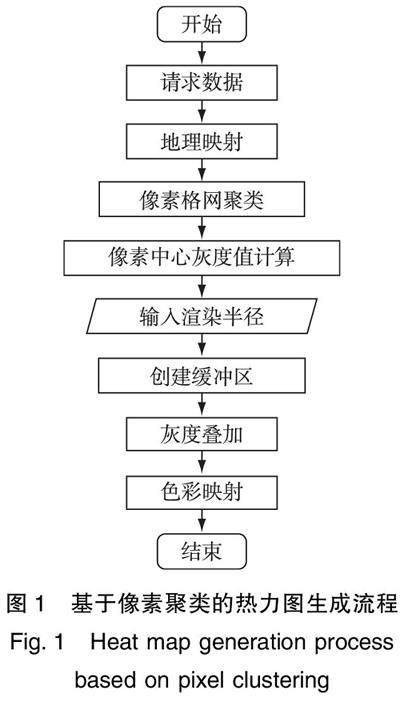
多模态信息融合 | 一种船舶历史活动热力图实时生成策略
多模态信息融合 | 一种船舶历史活动热力图实时生成策略
-

多模态信息融合 | 基于FRFT的低信噪比LFM信号参数快速估计算法
多模态信息融合 | 基于FRFT的低信噪比LFM信号参数快速估计算法
-

多模态信息融合 | 基于ICEEMDAN和小波阈值的Φ-OTDR信号去噪算法
多模态信息融合 | 基于ICEEMDAN和小波阈值的Φ-OTDR信号去噪算法
-
建模仿真与评估 | 无人空战指控建模仿真方法研究
建模仿真与评估 | 无人空战指控建模仿真方法研究
-
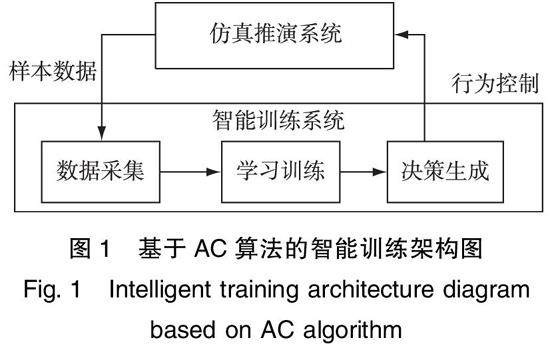
建模仿真与评估 | 基于仿真实验的智能并行训练方法
建模仿真与评估 | 基于仿真实验的智能并行训练方法
-
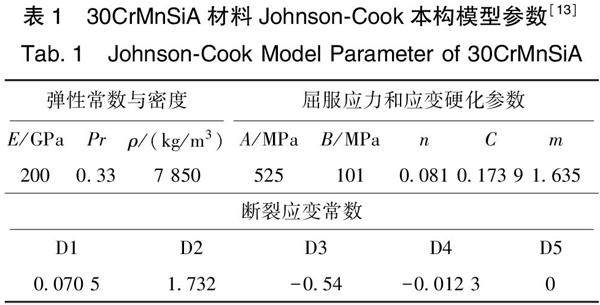
建模仿真与评估 | 半穿甲舰炮弹药侵彻舰船靶板数值仿真研究
建模仿真与评估 | 半穿甲舰炮弹药侵彻舰船靶板数值仿真研究
-

建模仿真与评估 | 火箭爆破器爆炸带落点位置受风影响动力学仿真研究
建模仿真与评估 | 火箭爆破器爆炸带落点位置受风影响动力学仿真研究
-
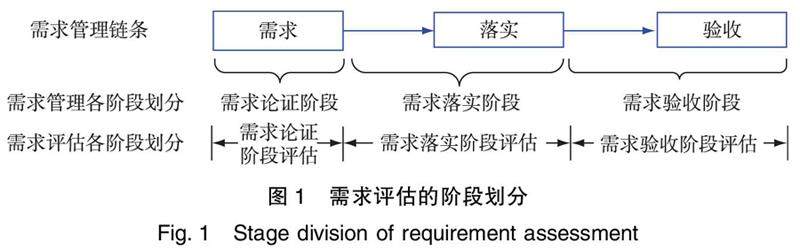
建模仿真与评估 | 军事需求评估的形式化建模分析
建模仿真与评估 | 军事需求评估的形式化建模分析
-
雷达/通信/导航 | 面向协同探测的多机雷达功率时间联合优化分配算法
雷达/通信/导航 | 面向协同探测的多机雷达功率时间联合优化分配算法
-
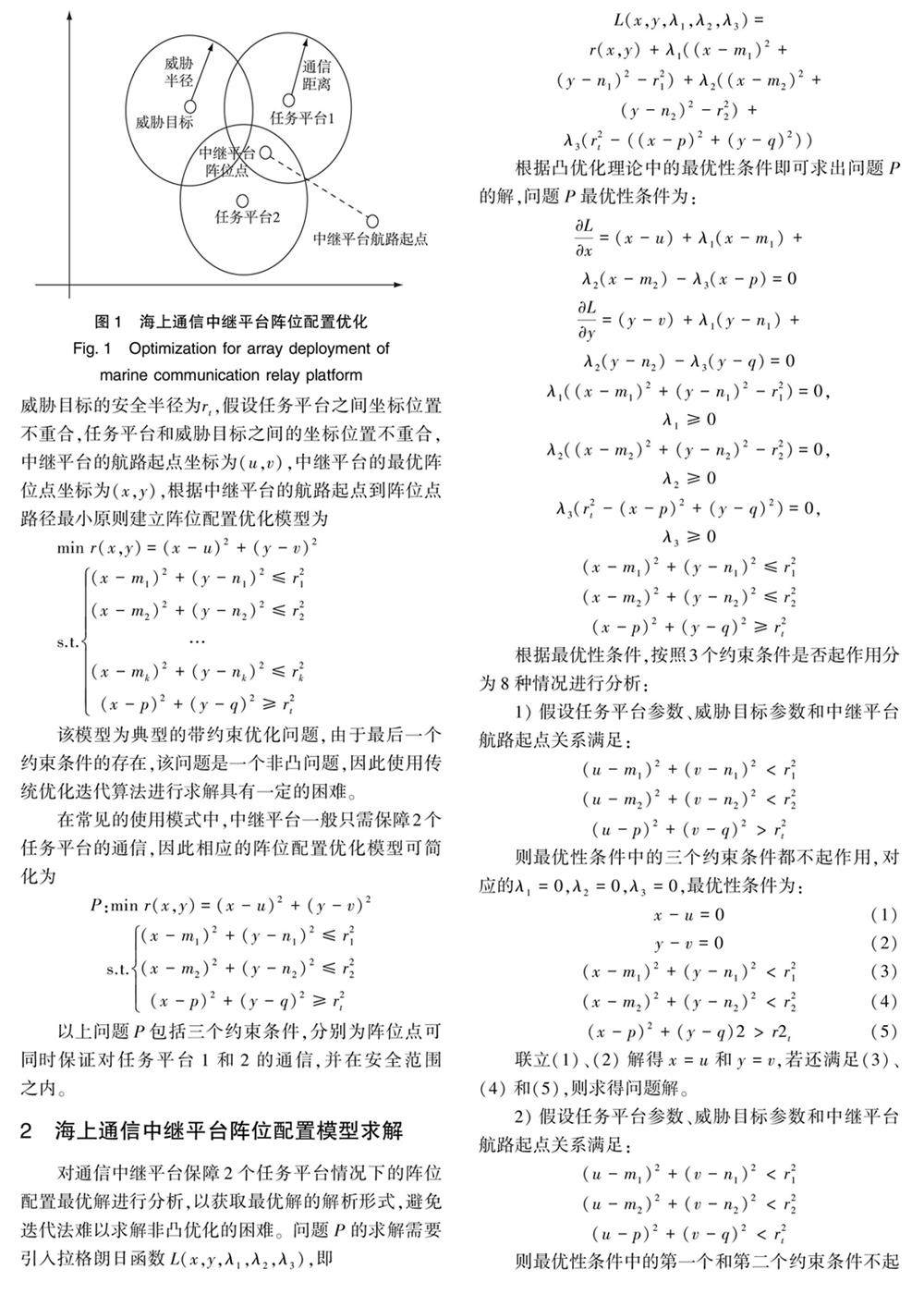
雷达/通信/导航 | 海上通信中继平台阵位配置优化模型
雷达/通信/导航 | 海上通信中继平台阵位配置优化模型
-

雷达/通信/导航 | 一种融合多源动态时空特征的战术互联网流量预测模型
雷达/通信/导航 | 一种融合多源动态时空特征的战术互联网流量预测模型
-
雷达/通信/导航 | 基于可靠性的卫星服务功能链保护方法
雷达/通信/导航 | 基于可靠性的卫星服务功能链保护方法
-
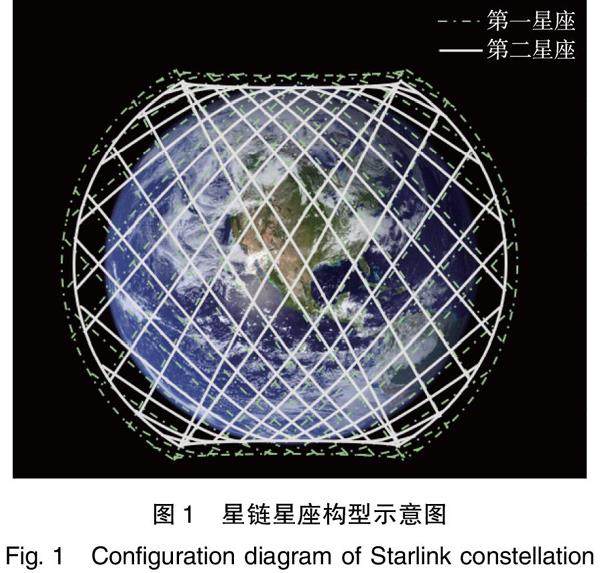
雷达/通信/导航 | 星链系统及其作战运用分析
雷达/通信/导航 | 星链系统及其作战运用分析












 登录
登录