
目录
快速导航-
设计与研究 | 离散轨道模型在地铁车辆一整体道床动力学 模拟中关键参数确定方法的研究
设计与研究 | 离散轨道模型在地铁车辆一整体道床动力学 模拟中关键参数确定方法的研究
-
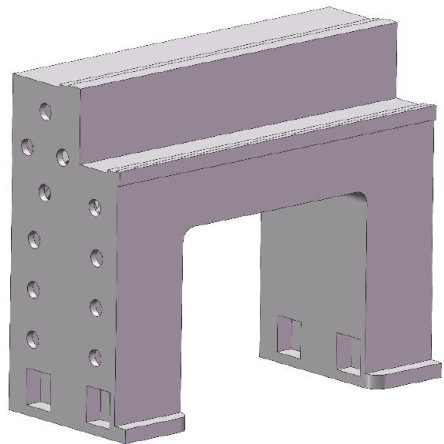
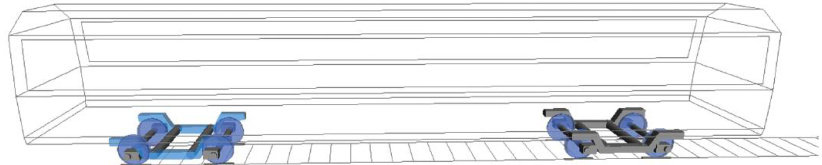
设计与研究 | BFPC填充阶梯型龙门架结构优化设计
设计与研究 | BFPC填充阶梯型龙门架结构优化设计
-

设计与研究 | 一种啮合型秸秆粉碎齿辊齿廓设计
设计与研究 | 一种啮合型秸秆粉碎齿辊齿廓设计
-
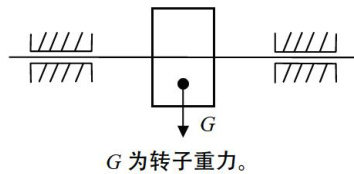
设计与研究 | 大展弦比航空发动机叶片不平衡的四维量化方法研究
设计与研究 | 大展弦比航空发动机叶片不平衡的四维量化方法研究
-

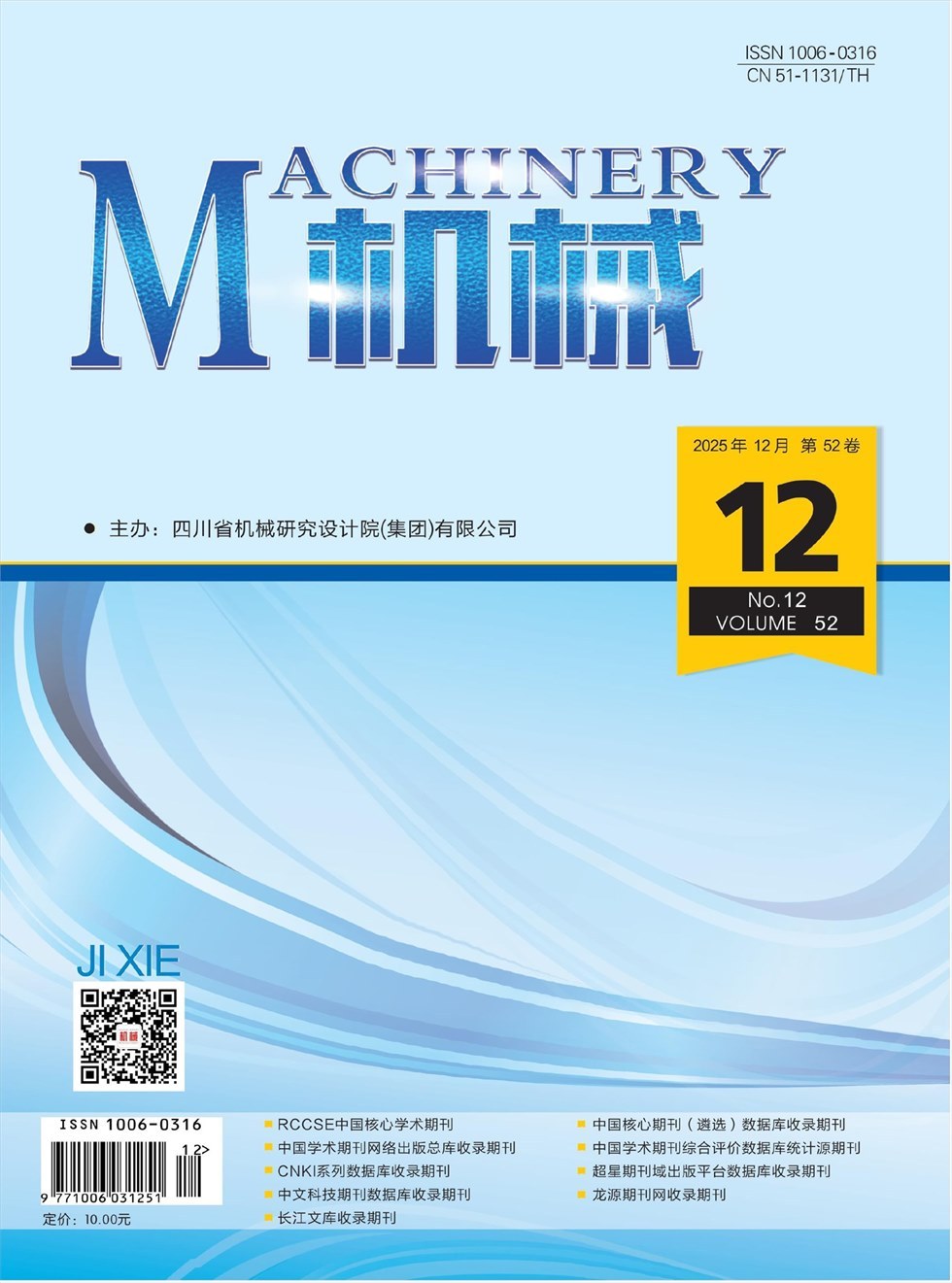
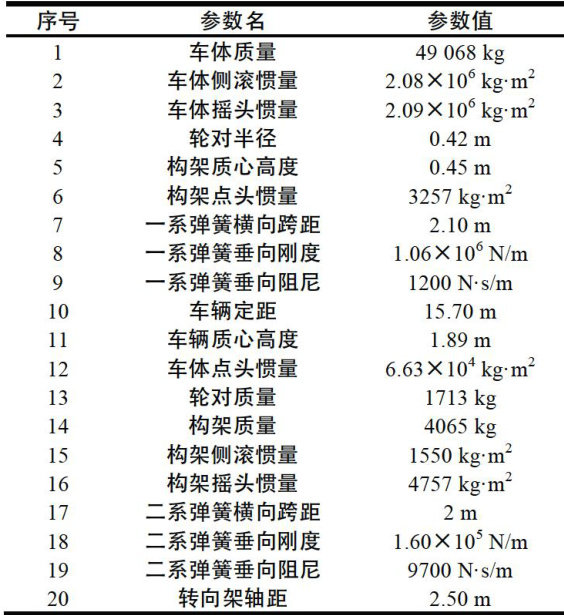
交通工程技术 | 强侧风下高重心轴箱内置城际动车组运行安全性分析
交通工程技术 | 强侧风下高重心轴箱内置城际动车组运行安全性分析
-
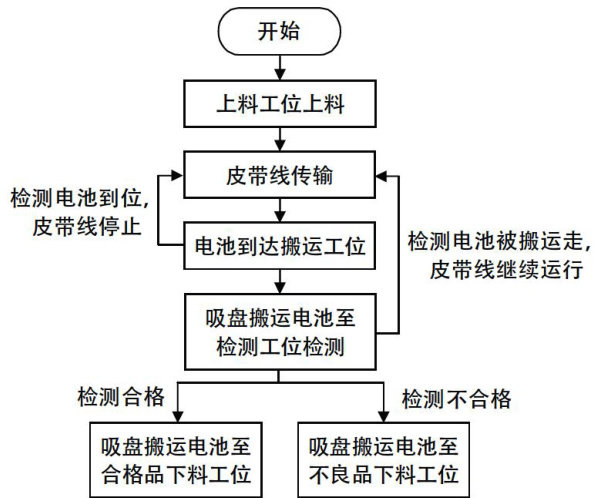
测量与检测技术 | 基于BYtwin的电池检测工作站数字孪生虚拟仿真研究
测量与检测技术 | 基于BYtwin的电池检测工作站数字孪生虚拟仿真研究
-
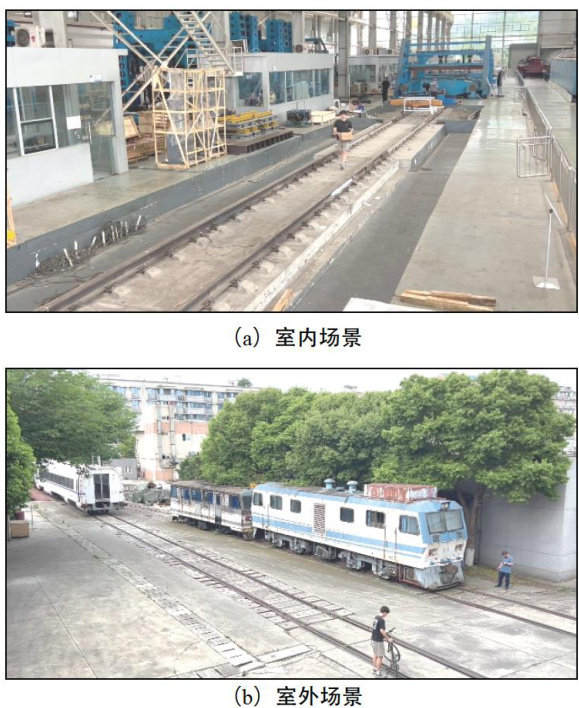
测量与检测技术 | 基于卡尔曼滤波的轨道短波不平顺检测算法研究
测量与检测技术 | 基于卡尔曼滤波的轨道短波不平顺检测算法研究
-
测量与检测技术 | 基于多尺度特征融合的轨旁异物侵限目标检测方法研究
测量与检测技术 | 基于多尺度特征融合的轨旁异物侵限目标检测方法研究
-
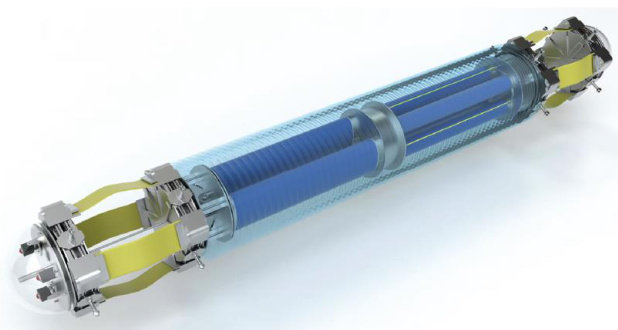
机器人技术 | 一种肌腱驱动预充气软体管道机器人的设计
机器人技术 | 一种肌腱驱动预充气软体管道机器人的设计
-

机器人技术 | 兜孔形状对高速轻载机器人轴承保持架力学性能的影响研究
机器人技术 | 兜孔形状对高速轻载机器人轴承保持架力学性能的影响研究
















 登录
登录