

目录
快速导航-
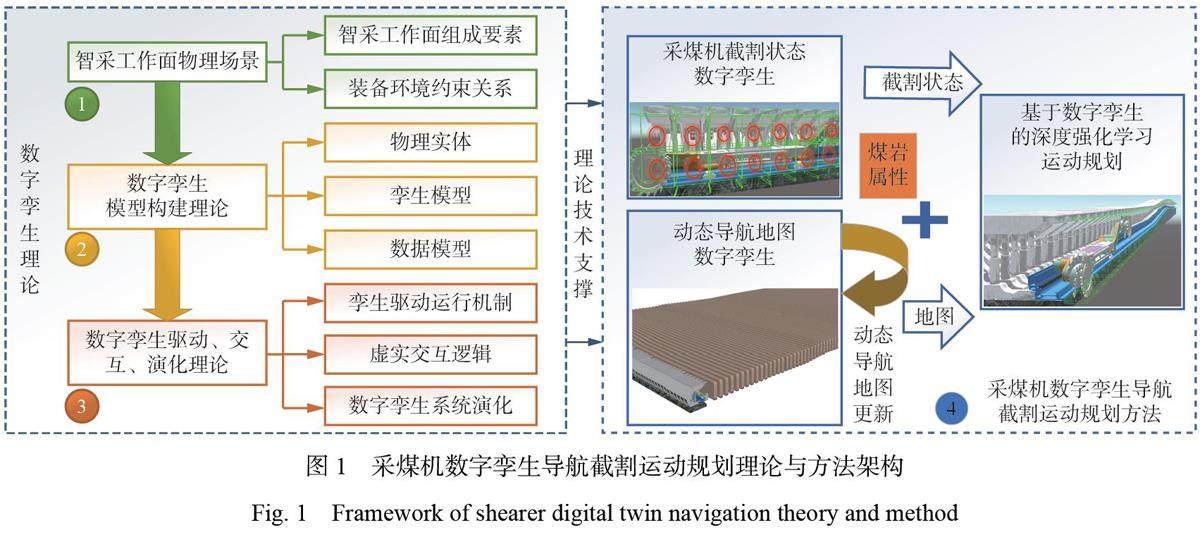
“矿山智能开采控制技术”专题 | 采煤机数字孪生导航截割运动规划理论与方法
“矿山智能开采控制技术”专题 | 采煤机数字孪生导航截割运动规划理论与方法
-
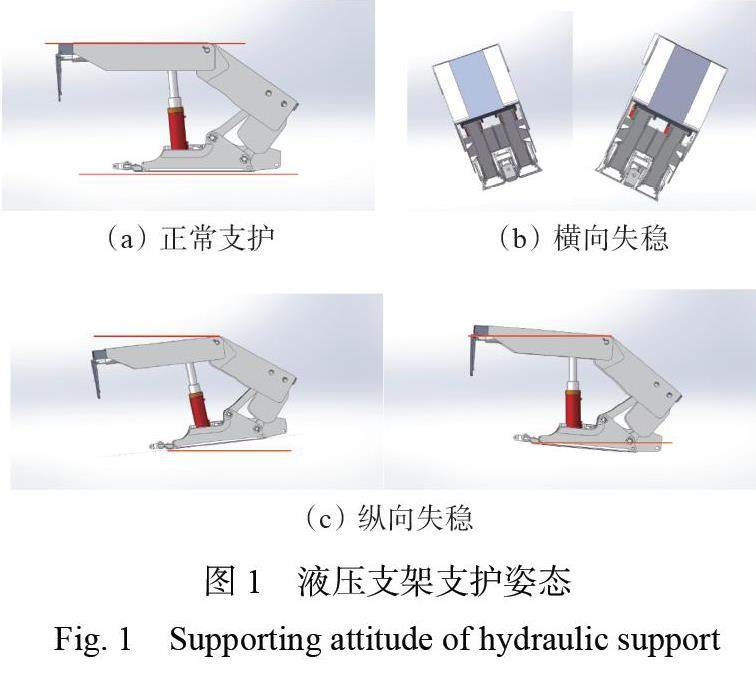
“矿山智能开采控制技术”专题 | 基于PSO−ELM的综采工作面液压支架姿态监测方法
“矿山智能开采控制技术”专题 | 基于PSO−ELM的综采工作面液压支架姿态监测方法
-
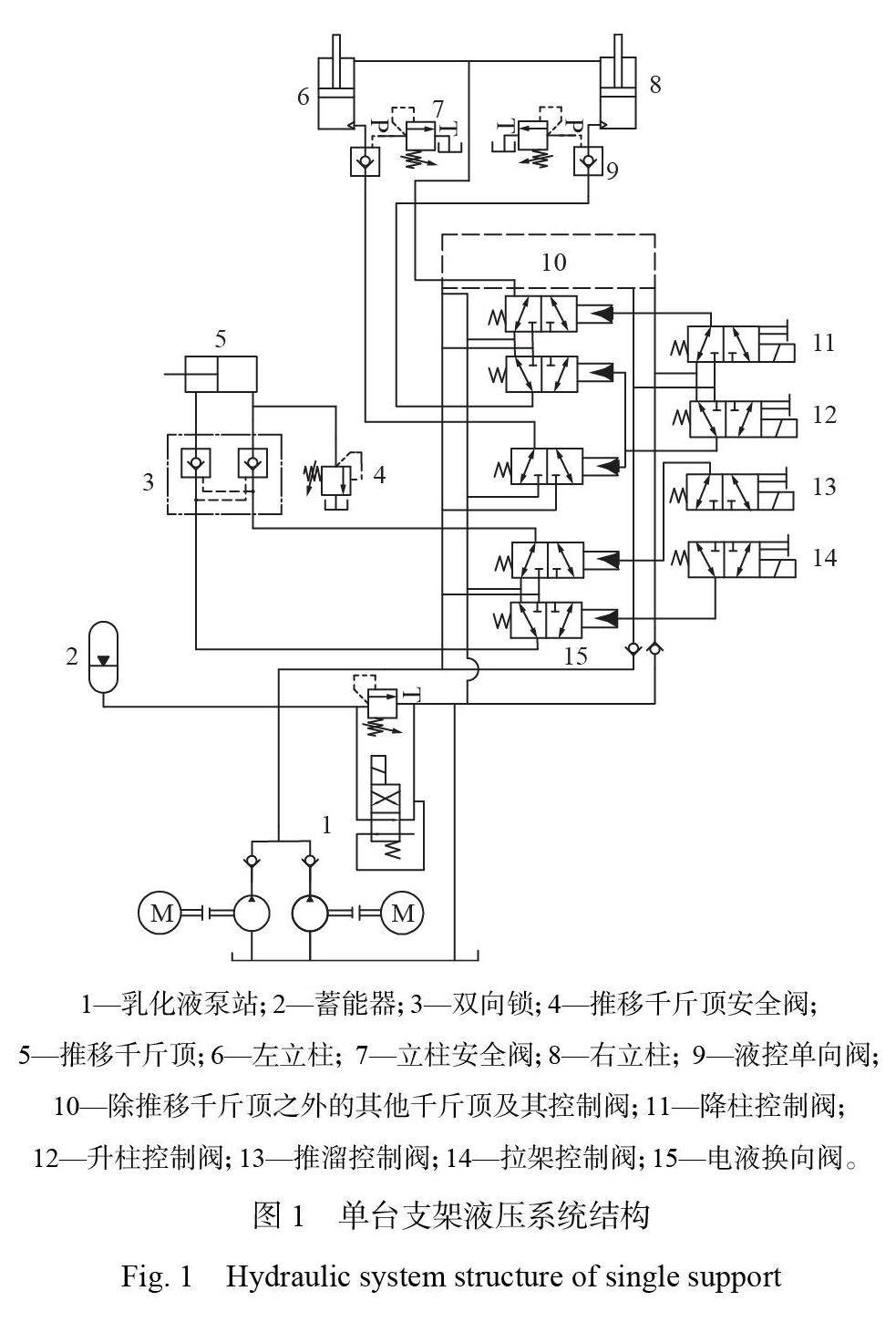
“矿山智能开采控制技术”专题 | 综采支架液压系统动态特性研究及改进设计
“矿山智能开采控制技术”专题 | 综采支架液压系统动态特性研究及改进设计
-
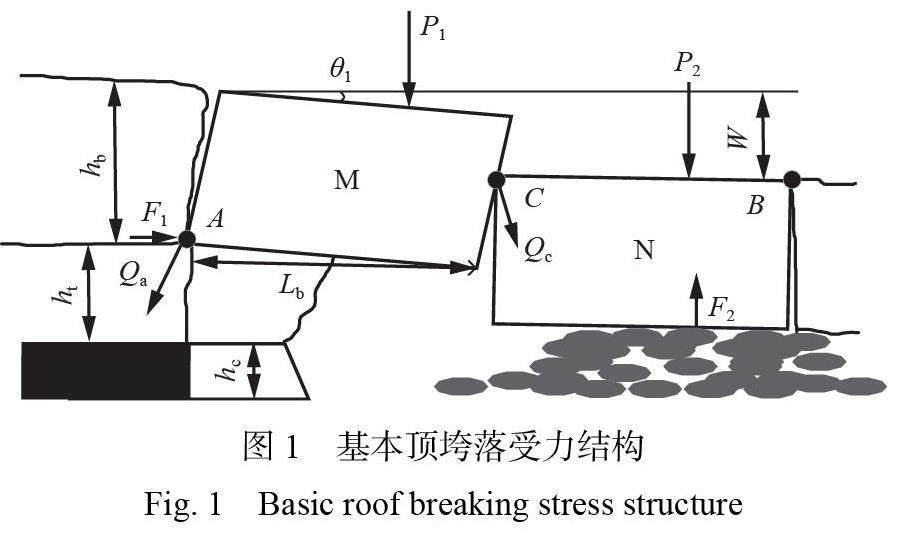
“矿山智能开采控制技术”专题 | 基于动态自适应旗鱼优化BP 神经网络的工作面周期来压预测
“矿山智能开采控制技术”专题 | 基于动态自适应旗鱼优化BP 神经网络的工作面周期来压预测
-
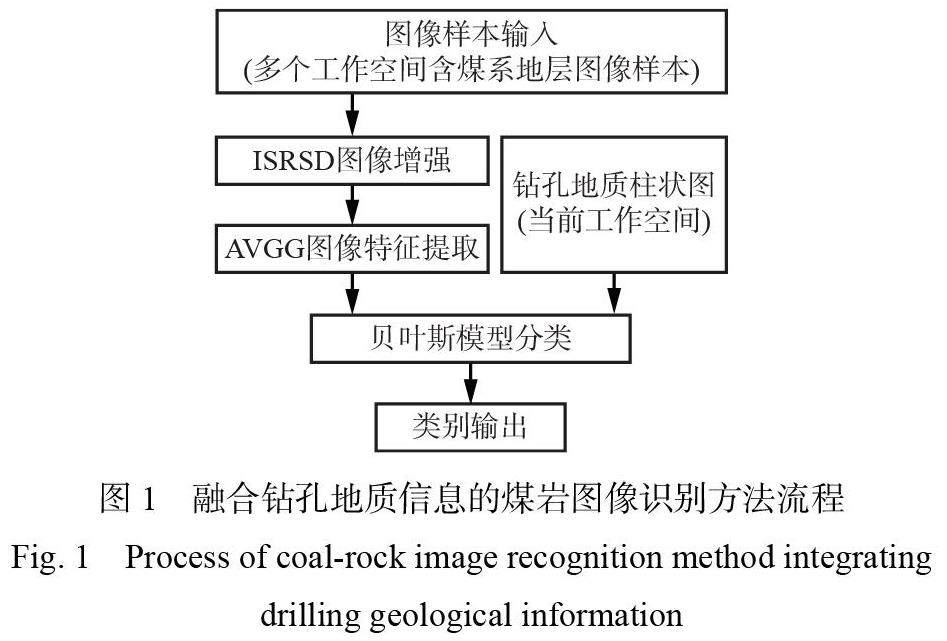
“矿山智能开采控制技术”专题 | 融合钻孔地质信息的煤岩图像识别方法
“矿山智能开采控制技术”专题 | 融合钻孔地质信息的煤岩图像识别方法
-

“矿山智能开采控制技术”专题 | 关家崖煤矿重复采动巷道变形特征及控制对策研究
“矿山智能开采控制技术”专题 | 关家崖煤矿重复采动巷道变形特征及控制对策研究
-
“矿山智能开采控制技术”专题 | 乌兰木伦煤矿大断面硐室围岩变形破坏规律及控制
“矿山智能开采控制技术”专题 | 乌兰木伦煤矿大断面硐室围岩变形破坏规律及控制
-
“矿山智能开采控制技术”专题 | 近距离煤层采掘关系对下位巷道围岩变形规律影响研究
“矿山智能开采控制技术”专题 | 近距离煤层采掘关系对下位巷道围岩变形规律影响研究
-
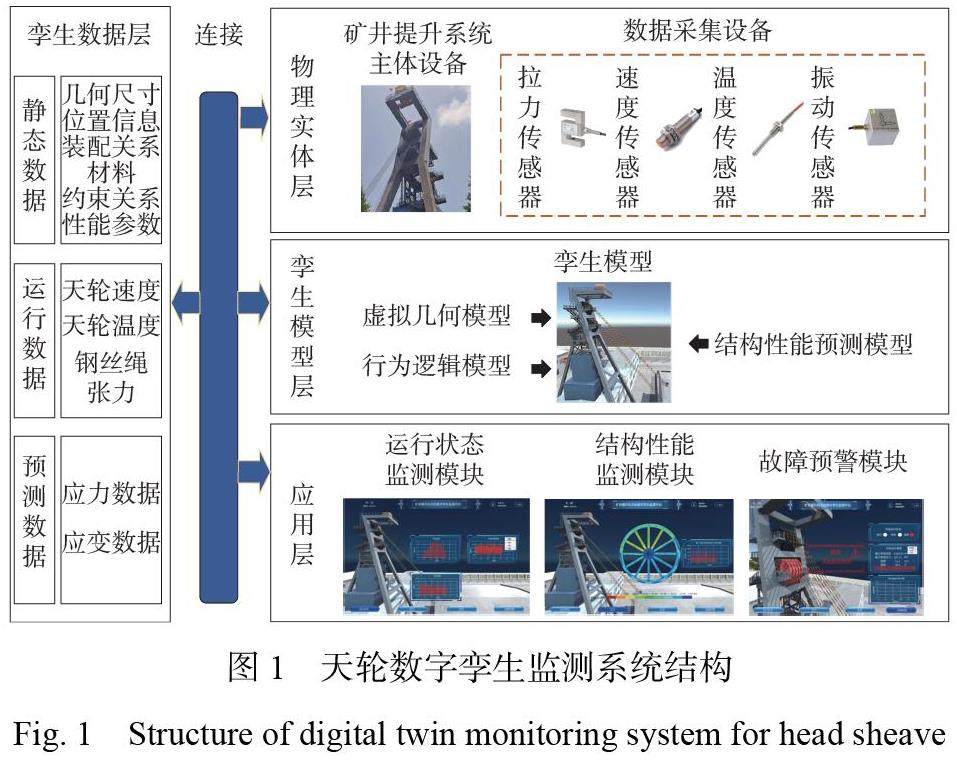
科研成果 | 基于数字孪生的矿井提升机天轮结构性能监测
科研成果 | 基于数字孪生的矿井提升机天轮结构性能监测
-
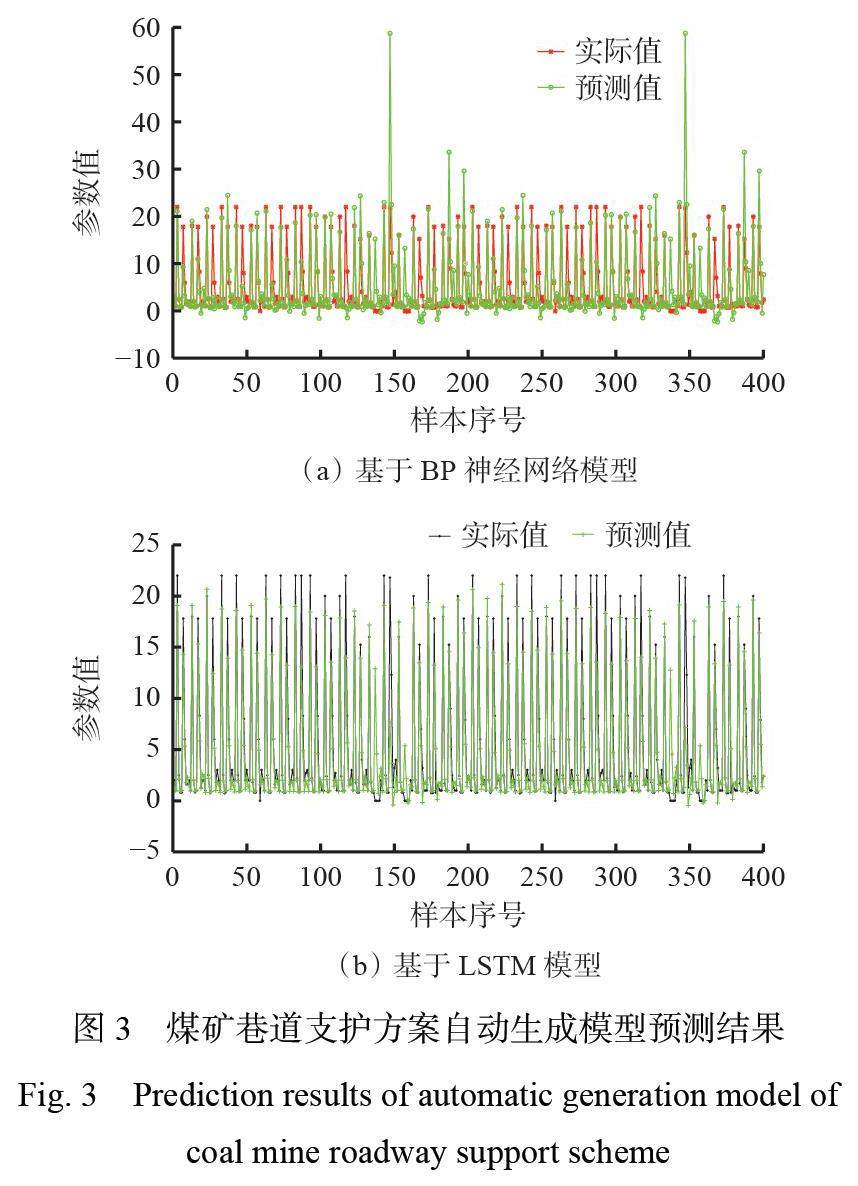
科研成果 | 煤矿巷道支护方案智能设计研究
科研成果 | 煤矿巷道支护方案智能设计研究
-
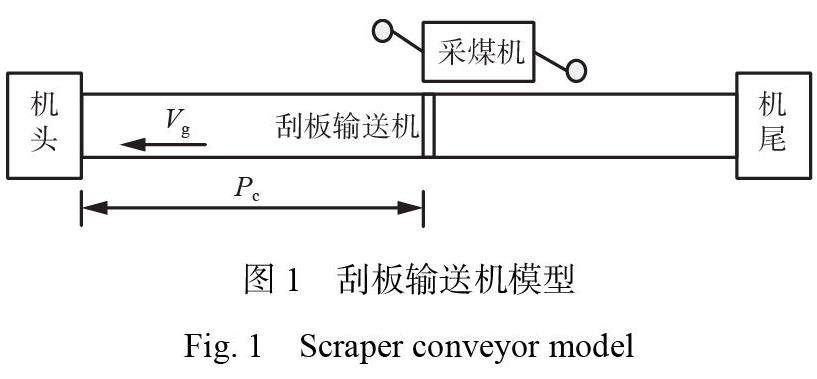
科研成果 | 基于数组的刮板输送机运载模型及煤量计算算法研究
科研成果 | 基于数组的刮板输送机运载模型及煤量计算算法研究
-
分析与研究 | 基于改进YOLOv8n+DeepSORT的带式输送机异物检测及计数方法
分析与研究 | 基于改进YOLOv8n+DeepSORT的带式输送机异物检测及计数方法
-
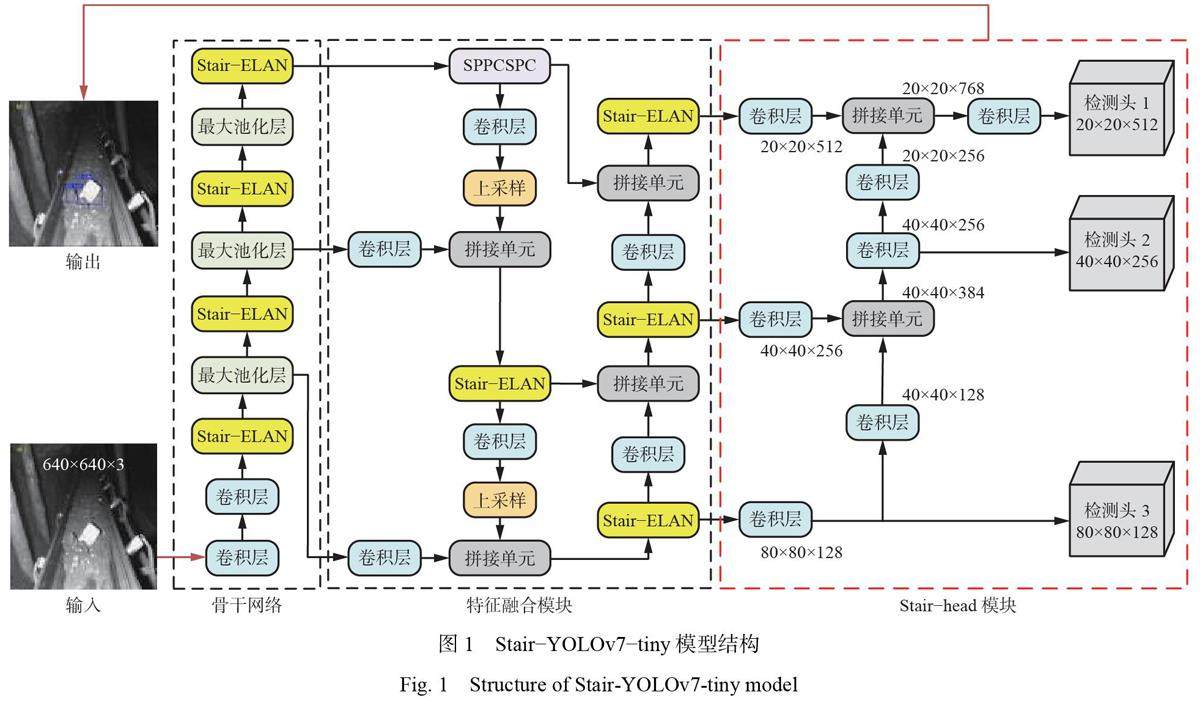
分析与研究 | 基于Stair−YOLOv7−tiny的煤矿井下输送带异物检测
分析与研究 | 基于Stair−YOLOv7−tiny的煤矿井下输送带异物检测
-
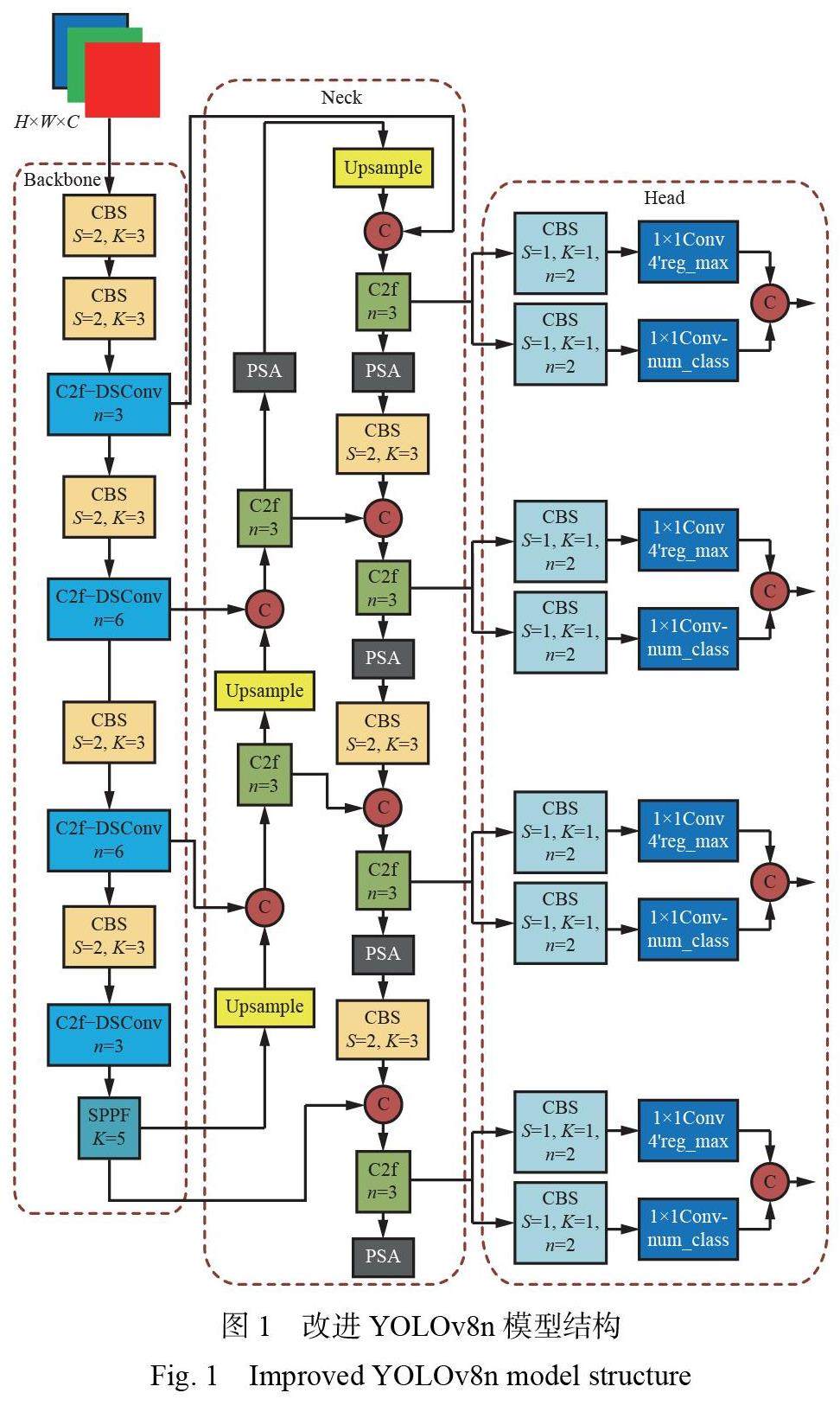
分析与研究 | 基于改进YOLOv8n的采掘工作面小目标检测方法
分析与研究 | 基于改进YOLOv8n的采掘工作面小目标检测方法
-

分析与研究 | 基于改进YOLOv8n的煤矿井下钻杆计数方法
分析与研究 | 基于改进YOLOv8n的煤矿井下钻杆计数方法
-
分析与研究 | 基于YOLOv5−SEDC模型的煤矸分割识别方法
分析与研究 | 基于YOLOv5−SEDC模型的煤矸分割识别方法
-
分析与研究 | 基于连通性阈值分割的煤岩裂隙识别方法
分析与研究 | 基于连通性阈值分割的煤岩裂隙识别方法
-
分析与研究 | 基于模糊神经网络PID 的煤矿掘进机俯仰控制研究
分析与研究 | 基于模糊神经网络PID 的煤矿掘进机俯仰控制研究
-
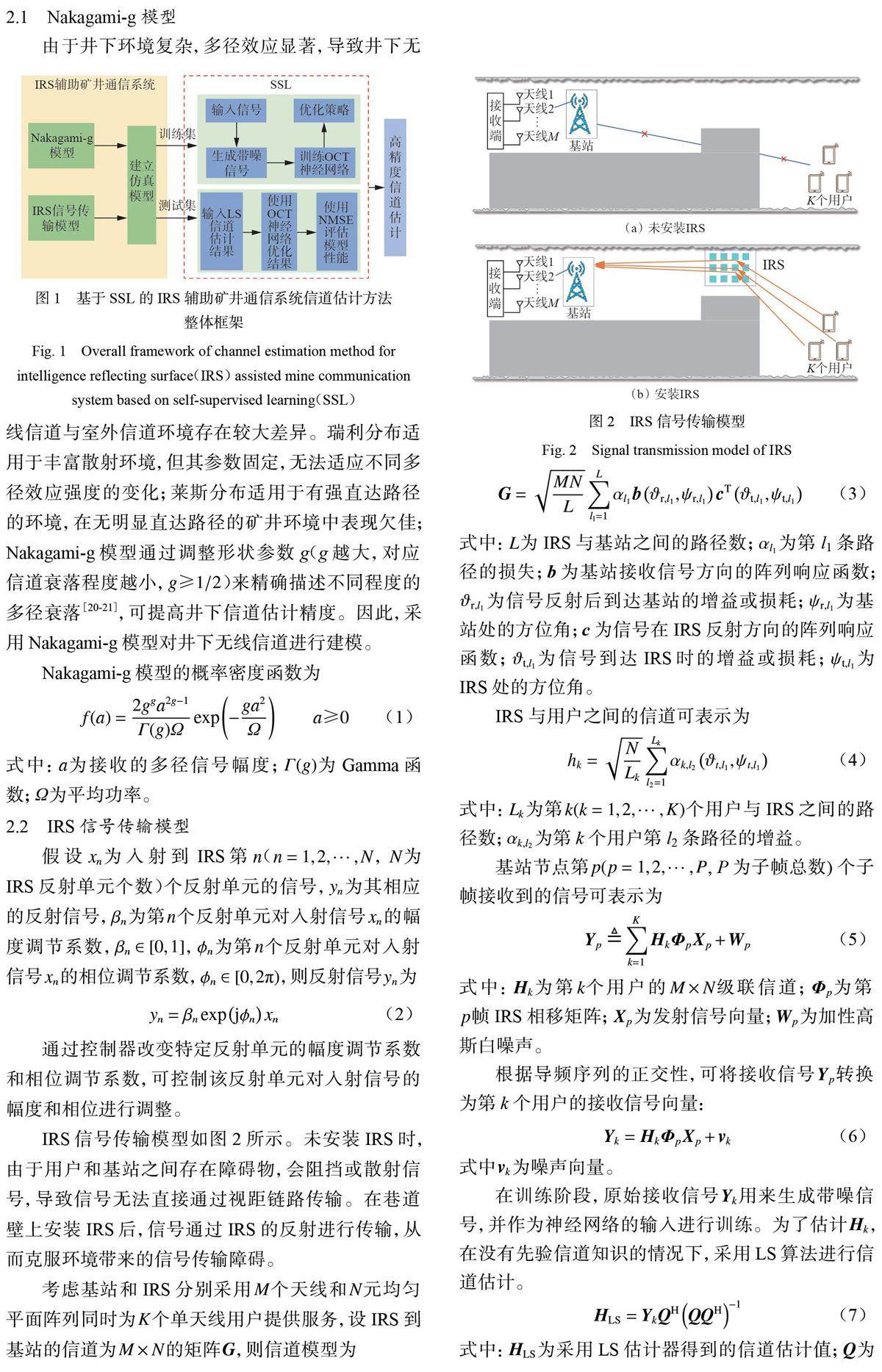
分析与研究 | 基于自监督学习的IRS辅助矿井通信系统信道估计方法
分析与研究 | 基于自监督学习的IRS辅助矿井通信系统信道估计方法
-
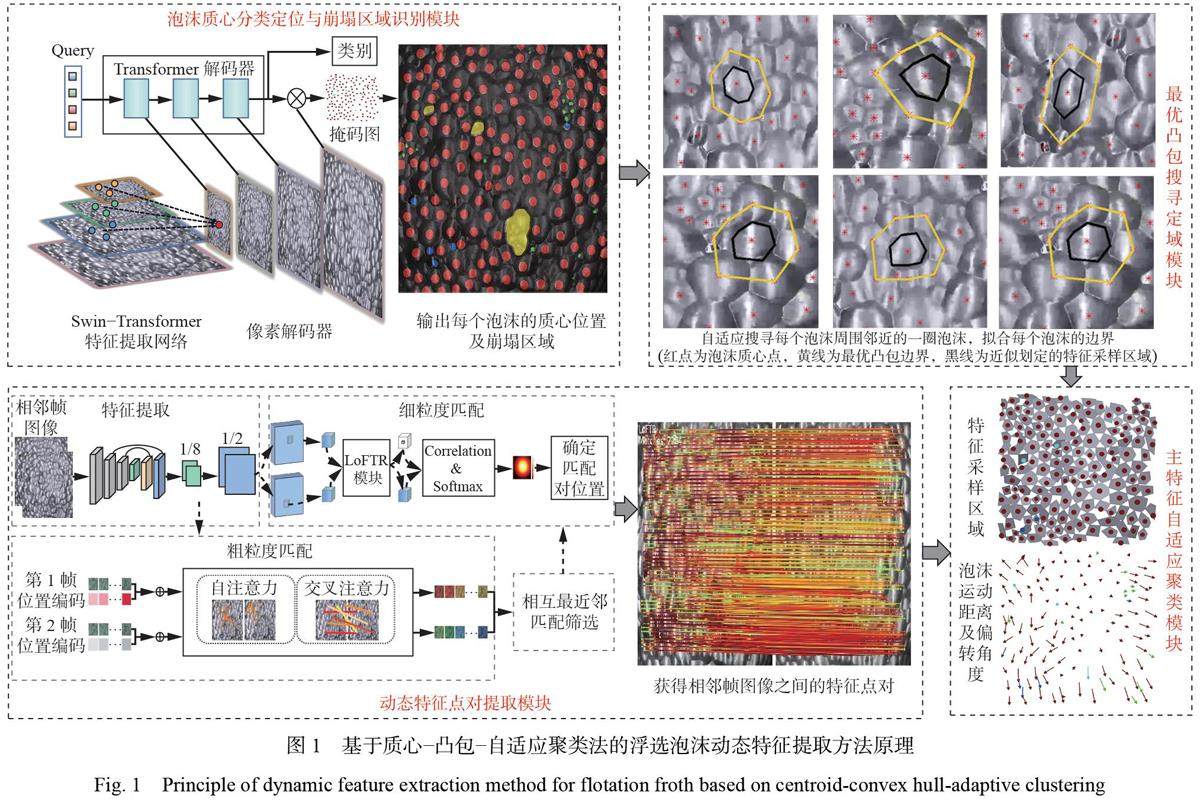
分析与研究 | 基于质心−凸包−自适应聚类法的浮选泡沫动态特征提取
分析与研究 | 基于质心−凸包−自适应聚类法的浮选泡沫动态特征提取











 登录
登录