

目录
快速导航-
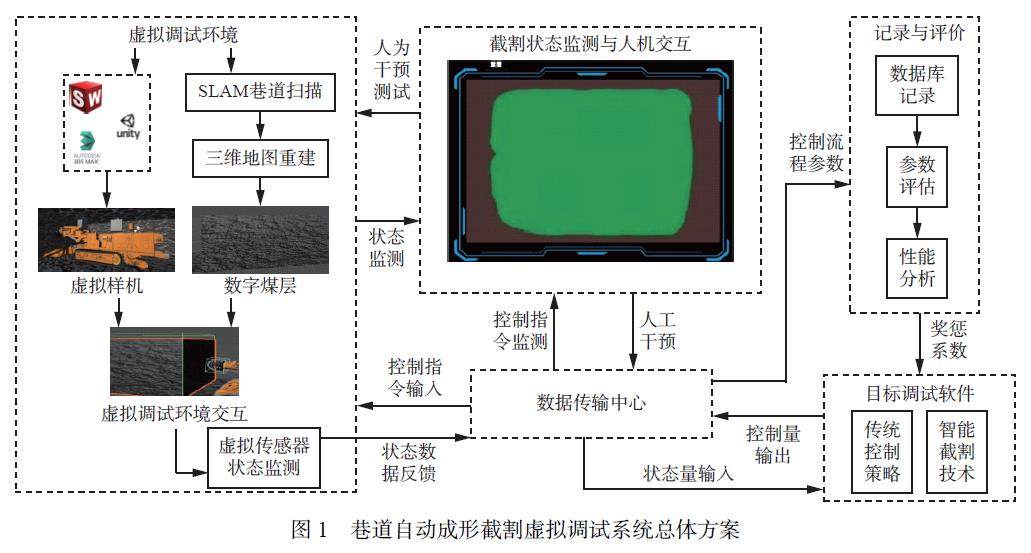
| 数字孪生驱动的巷道自动成形截割虚拟调试方法研究
| 数字孪生驱动的巷道自动成形截割虚拟调试方法研究
-
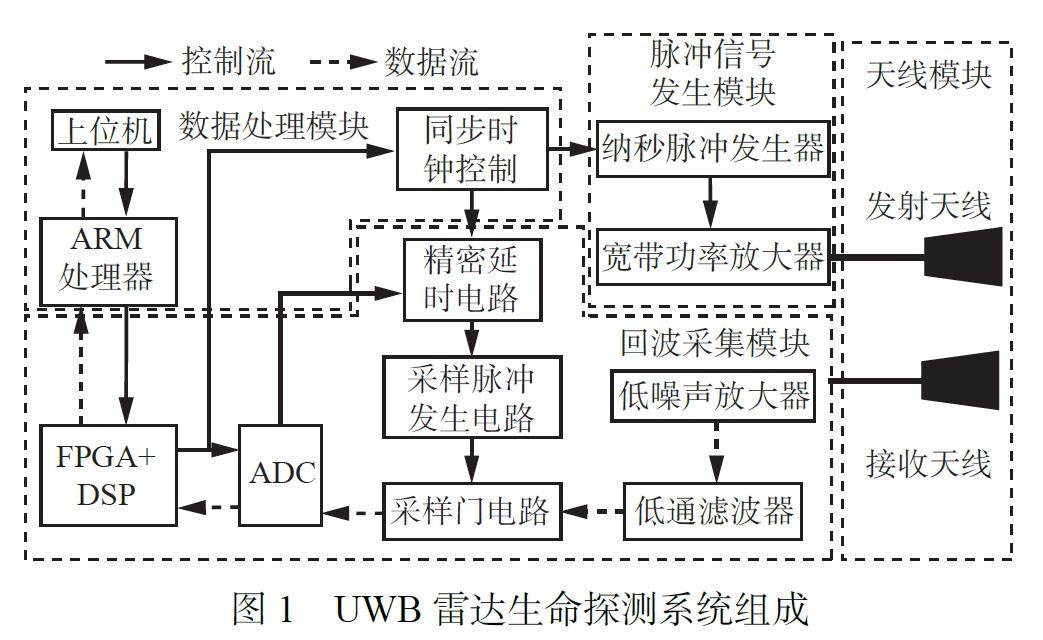
| 面向矿山救援的UWB 雷达生命信息识别研究现状与展望
| 面向矿山救援的UWB 雷达生命信息识别研究现状与展望
-

科研成果 | 护盾式临时支护机器人带压行驶液压控制系统研究
科研成果 | 护盾式临时支护机器人带压行驶液压控制系统研究
-
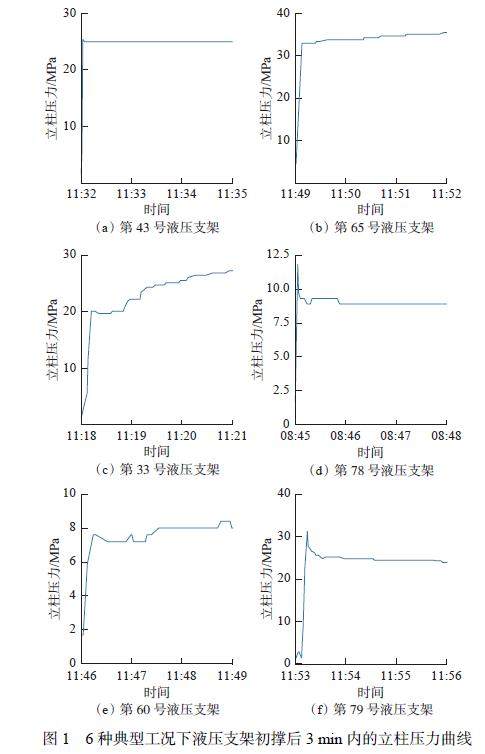
科研成果 | 基于数据驱动的液压支架初撑后承压效果即时预测技术
科研成果 | 基于数据驱动的液压支架初撑后承压效果即时预测技术
-
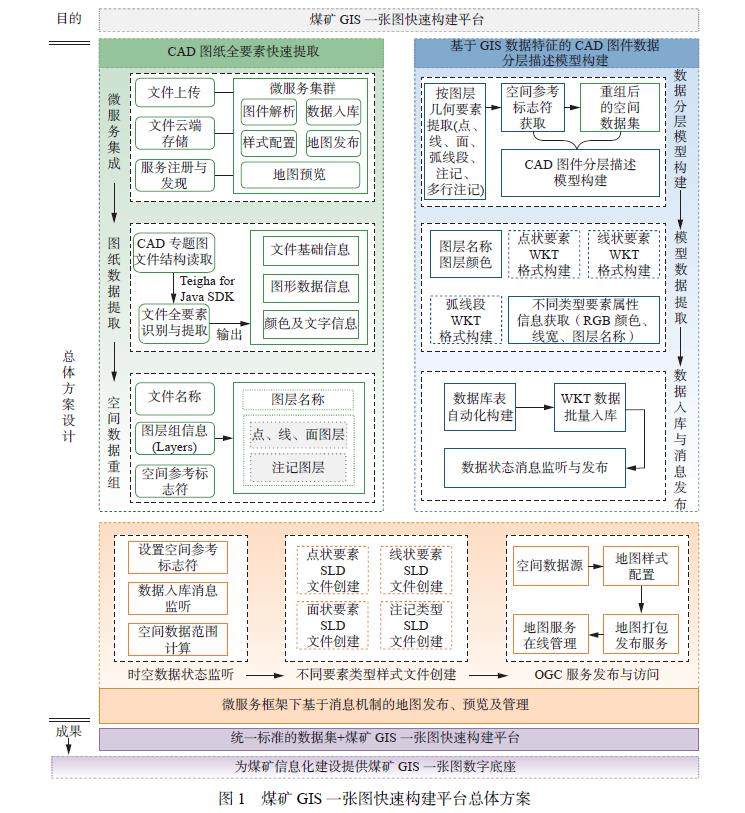
科研成果 | 煤矿GIS 一张图快速构建平台研究
科研成果 | 煤矿GIS 一张图快速构建平台研究
-
科研成果 | 基于多因素耦合量化表征模型的冲击危险区域划分
科研成果 | 基于多因素耦合量化表征模型的冲击危险区域划分
-
科研成果 | 高应力断层构造区巷道冲击破坏特征研究
科研成果 | 高应力断层构造区巷道冲击破坏特征研究
-

综述 | 采煤机智能化发展现状及关键技术展望
综述 | 采煤机智能化发展现状及关键技术展望
-
综述 | 煤矿用5G 关键技术研究现状与发展方向
综述 | 煤矿用5G 关键技术研究现状与发展方向
-
分析与研究 | 面向煤矿安全监测边缘计算的YOLOv5s 剪枝方法
分析与研究 | 面向煤矿安全监测边缘计算的YOLOv5s 剪枝方法
-
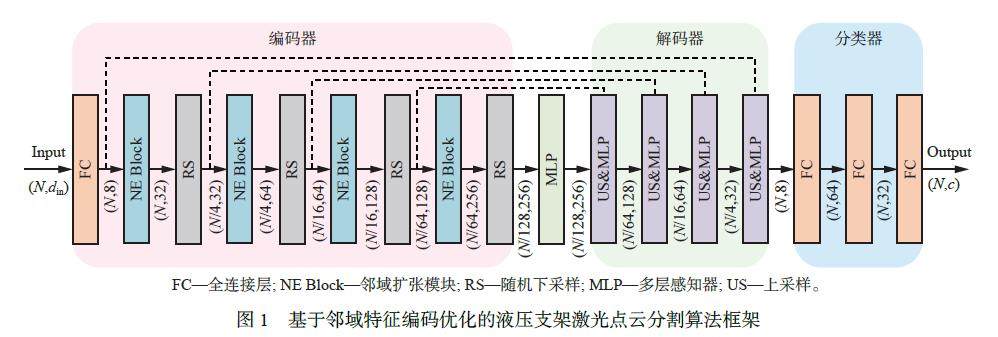
分析与研究 | 基于邻域特征编码优化的液压支架激光点云分割算法
分析与研究 | 基于邻域特征编码优化的液压支架激光点云分割算法
-
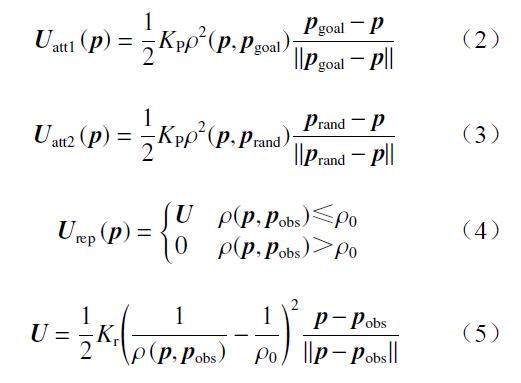
分析与研究 | 煤矿巡检机器人路径规划方法
分析与研究 | 煤矿巡检机器人路径规划方法
-
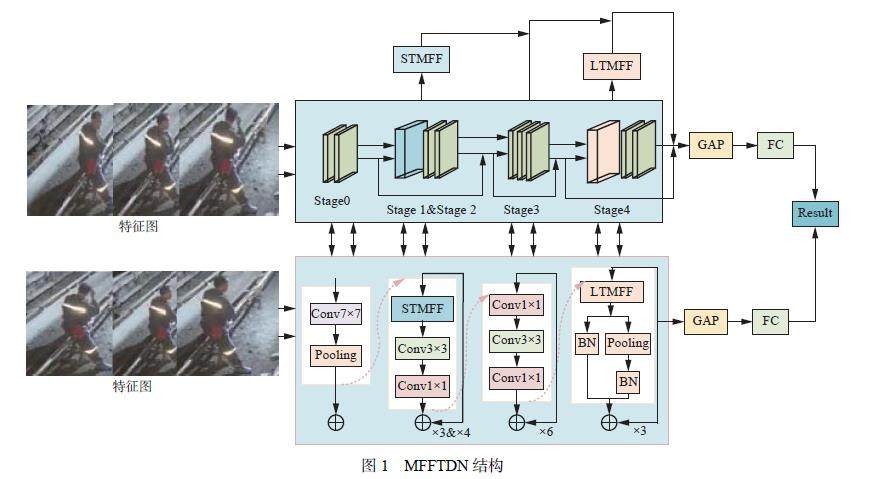
分析与研究 | 基于多特征融合时差网络的带式输送机区域违规行为识别
分析与研究 | 基于多特征融合时差网络的带式输送机区域违规行为识别
-
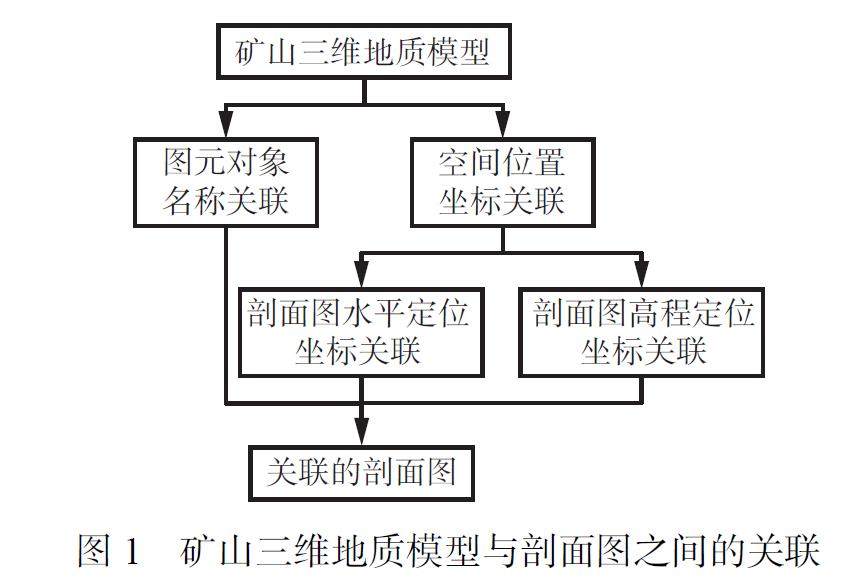
分析与研究 | 与矿山三维地质模型自动关联的剖面图更新方法
分析与研究 | 与矿山三维地质模型自动关联的剖面图更新方法
-
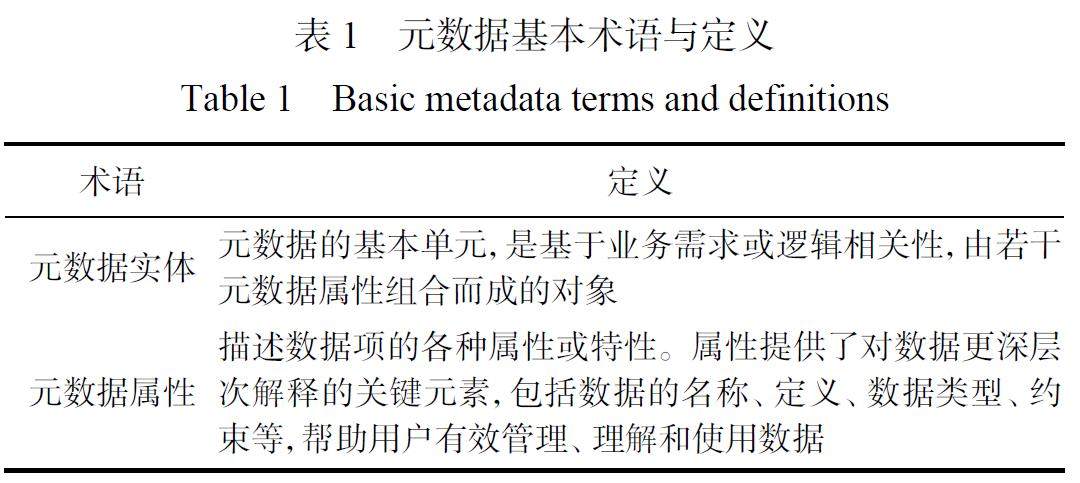
分析与研究 | 基于智能化矿山数据分类与编码规范的元数据标准构建方法
分析与研究 | 基于智能化矿山数据分类与编码规范的元数据标准构建方法
-
分析与研究 | 煤矿井下金属结构等效储能模型耦合电磁波能量安全性分析
分析与研究 | 煤矿井下金属结构等效储能模型耦合电磁波能量安全性分析
-
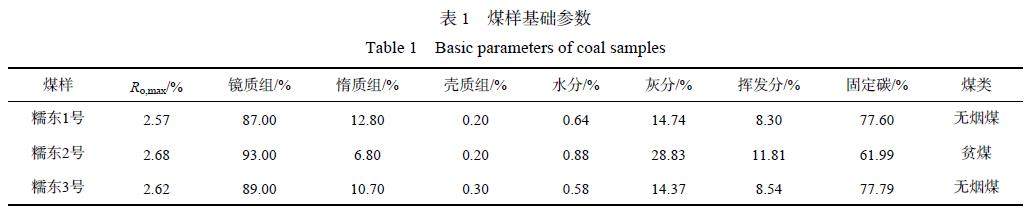
分析与研究 | 高阶煤吸附孔结构特征及其对甲烷吸附能力的影响
分析与研究 | 高阶煤吸附孔结构特征及其对甲烷吸附能力的影响
-
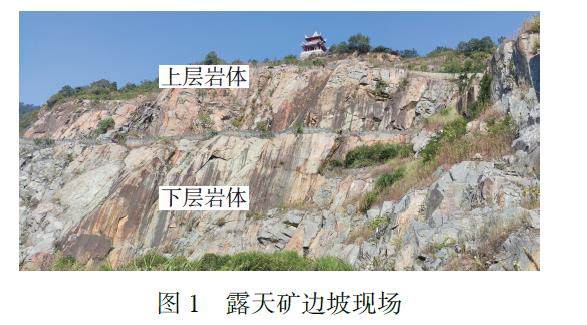
经验交流 | 岩质高边坡结构面识别及产状统计信息采集方法
经验交流 | 岩质高边坡结构面识别及产状统计信息采集方法
-
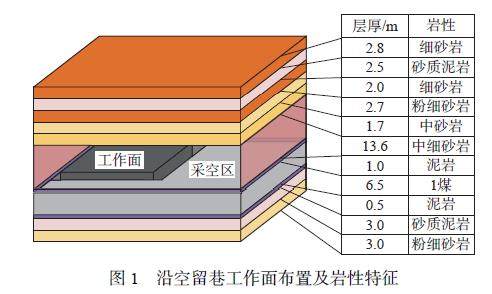
经验交流 | 深埋矿井沿空留巷切顶卸压底板变形控制
经验交流 | 深埋矿井沿空留巷切顶卸压底板变形控制
-
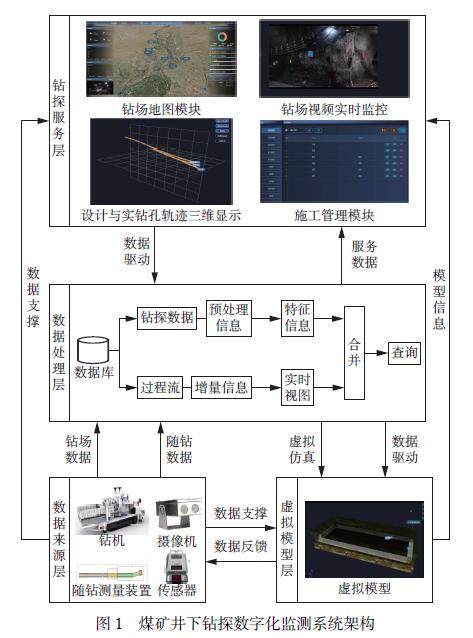
经验交流 | 煤矿井下钻探数字化监测系统
经验交流 | 煤矿井下钻探数字化监测系统











 登录
登录