
目录
快速导航-
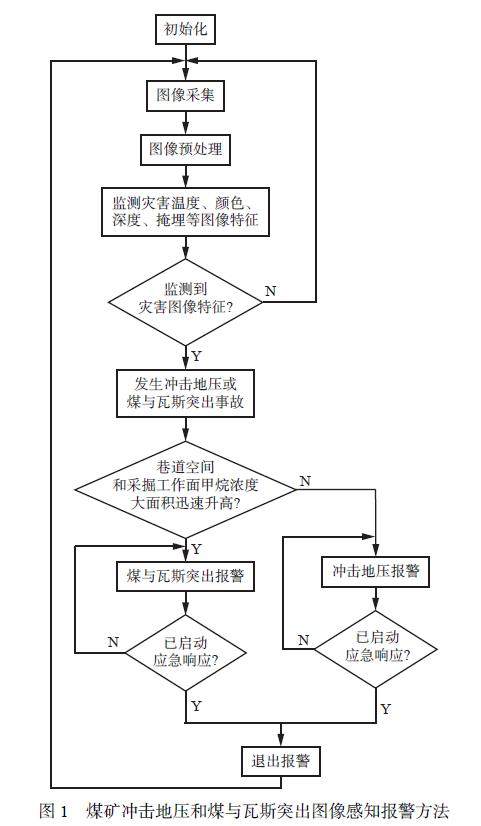
编委学术专栏 | 煤矿冲击地压和煤与瓦斯突出事故自动发现与报警方法研究
编委学术专栏 | 煤矿冲击地压和煤与瓦斯突出事故自动发现与报警方法研究
-
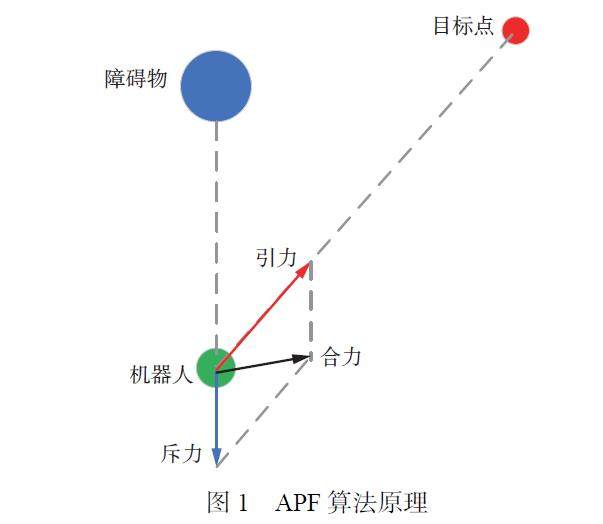
编委学术专栏 | 基于改进人工势场算法的煤矿井下机器人路径规划
编委学术专栏 | 基于改进人工势场算法的煤矿井下机器人路径规划
-
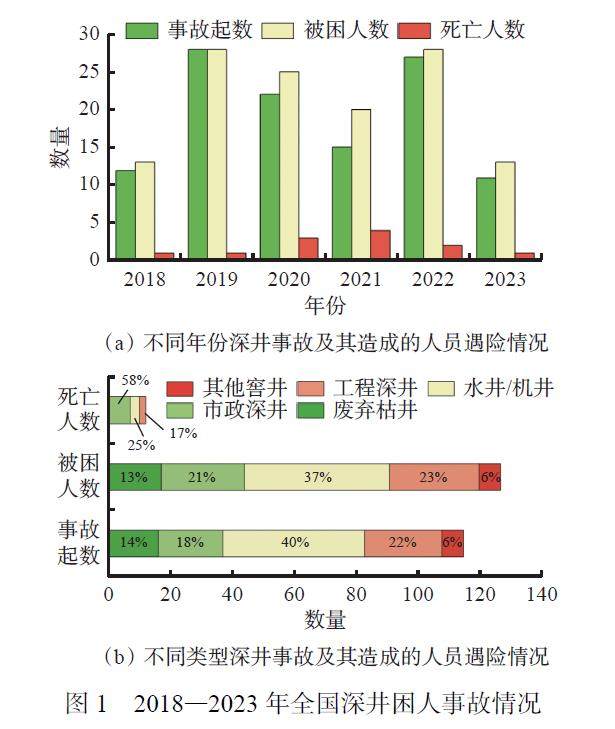
综述 | 深井救援技术与装备研究现状和发展趋势
综述 | 深井救援技术与装备研究现状和发展趋势
-
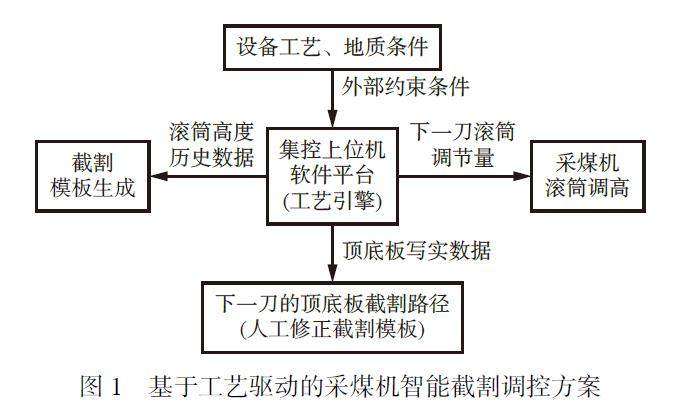
科研成果 | 基于工艺驱动的采煤机智能截割调控
科研成果 | 基于工艺驱动的采煤机智能截割调控
-
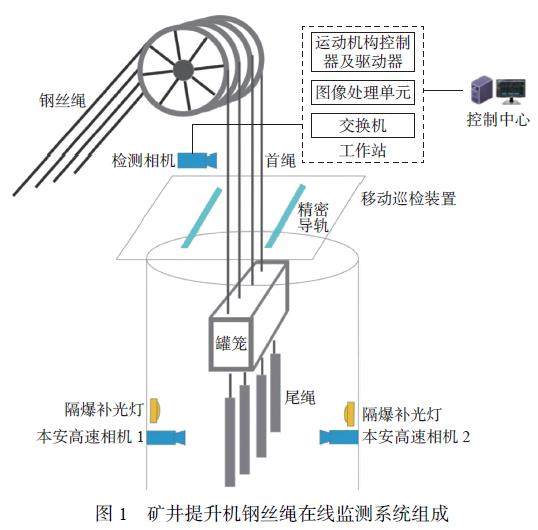
科研成果 | 矿井提升机钢丝绳外观缺陷视觉识别技术研究
科研成果 | 矿井提升机钢丝绳外观缺陷视觉识别技术研究
-
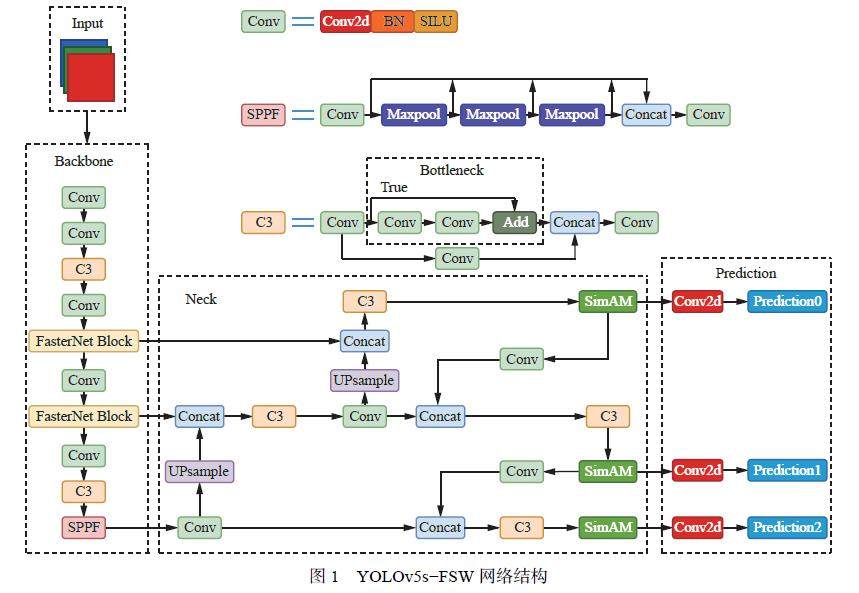
分析与研究 | 基于YOLOv5s−FSW 模型的选煤厂煤矸检测研究
分析与研究 | 基于YOLOv5s−FSW 模型的选煤厂煤矸检测研究
-
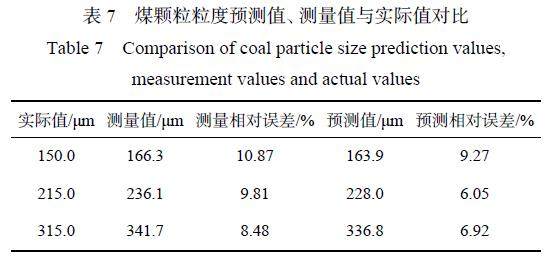
分析与研究 | 细粒煤分级溢流颗粒粒度在线检测研究
分析与研究 | 细粒煤分级溢流颗粒粒度在线检测研究
-
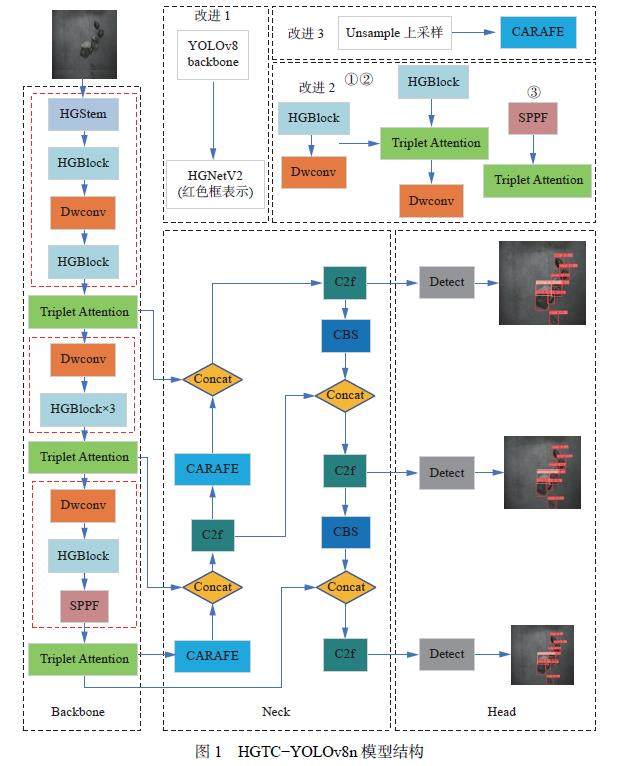
分析与研究 | 基于HGTC−YOLOv8n 模型的煤矸识别算法研究
分析与研究 | 基于HGTC−YOLOv8n 模型的煤矸识别算法研究
-
分析与研究 | 基于时间序列对齐和TCNformer 的重介精煤灰分多步预测
分析与研究 | 基于时间序列对齐和TCNformer 的重介精煤灰分多步预测
-
分析与研究 | 基于Social Transformer 的井下多人轨迹预测方法
分析与研究 | 基于Social Transformer 的井下多人轨迹预测方法
-
分析与研究 | 基于机器视觉的带式输送机高精度煤流检测研究
分析与研究 | 基于机器视觉的带式输送机高精度煤流检测研究
-

分析与研究 | 基于工业互联网的煤矿综采设备信息模型研究
分析与研究 | 基于工业互联网的煤矿综采设备信息模型研究
-
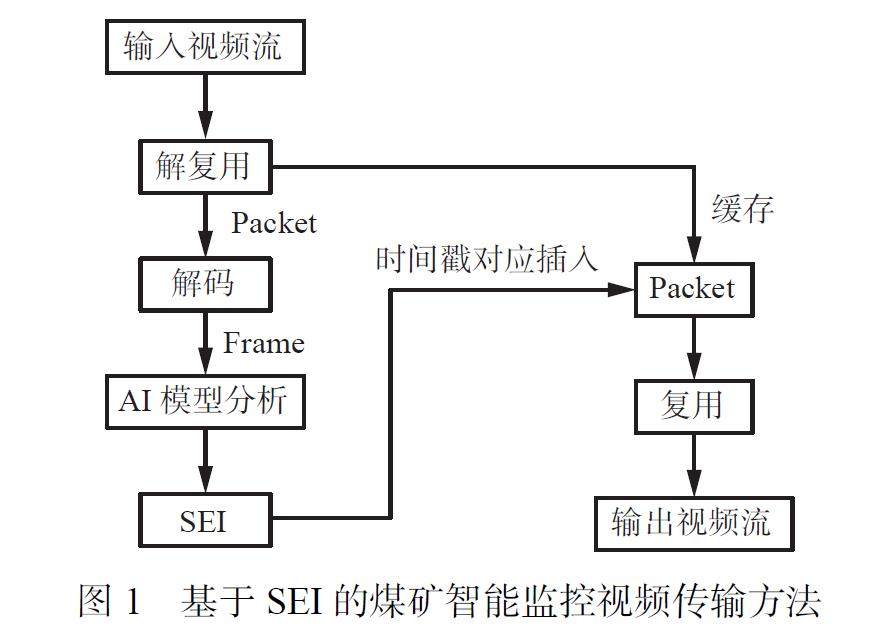
分析与研究 | 基于SEI 的煤矿智能监控视频传输方法
分析与研究 | 基于SEI 的煤矿智能监控视频传输方法
-

分析与研究 | 基于扩展卡尔曼滤波的清仓机器人位姿识别方法
分析与研究 | 基于扩展卡尔曼滤波的清仓机器人位姿识别方法
-

分析与研究 | 煤矿井下移动机器人多传感器自适应融合SLAM 方法
分析与研究 | 煤矿井下移动机器人多传感器自适应融合SLAM 方法
-
分析与研究 | 光学靶标遮挡条件下掘进机定位解算方法
分析与研究 | 光学靶标遮挡条件下掘进机定位解算方法
-
分析与研究 | 原煤与型煤损伤破坏的应力声发射变化特征对比研究
分析与研究 | 原煤与型煤损伤破坏的应力声发射变化特征对比研究
-
分析与研究 | 落锤冲击下冻结单裂隙砂岩力学及声发射特征试验研究
分析与研究 | 落锤冲击下冻结单裂隙砂岩力学及声发射特征试验研究
-
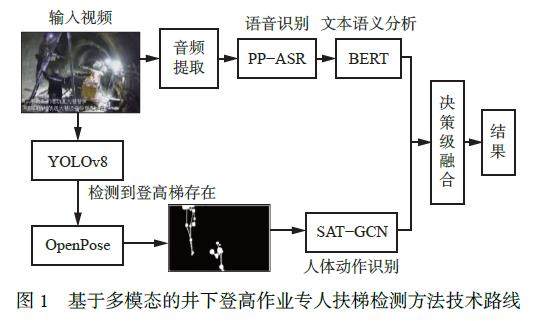
分析与研究 | 基于多模态的井下登高作业专人扶梯检测方法
分析与研究 | 基于多模态的井下登高作业专人扶梯检测方法
-
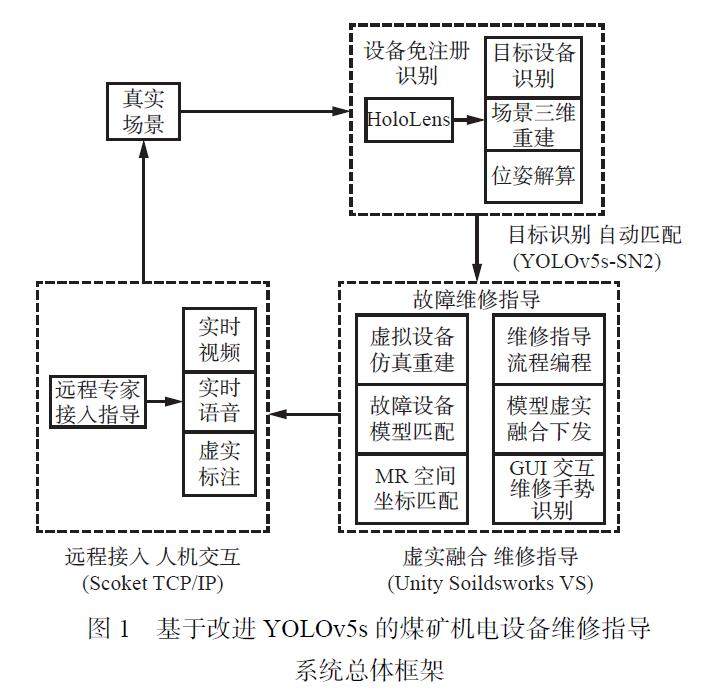
分析与研究 | 基于改进YOLOv5s 的煤矿机电设备维修指导系统
分析与研究 | 基于改进YOLOv5s 的煤矿机电设备维修指导系统











 登录
登录