
目录
快速导航-
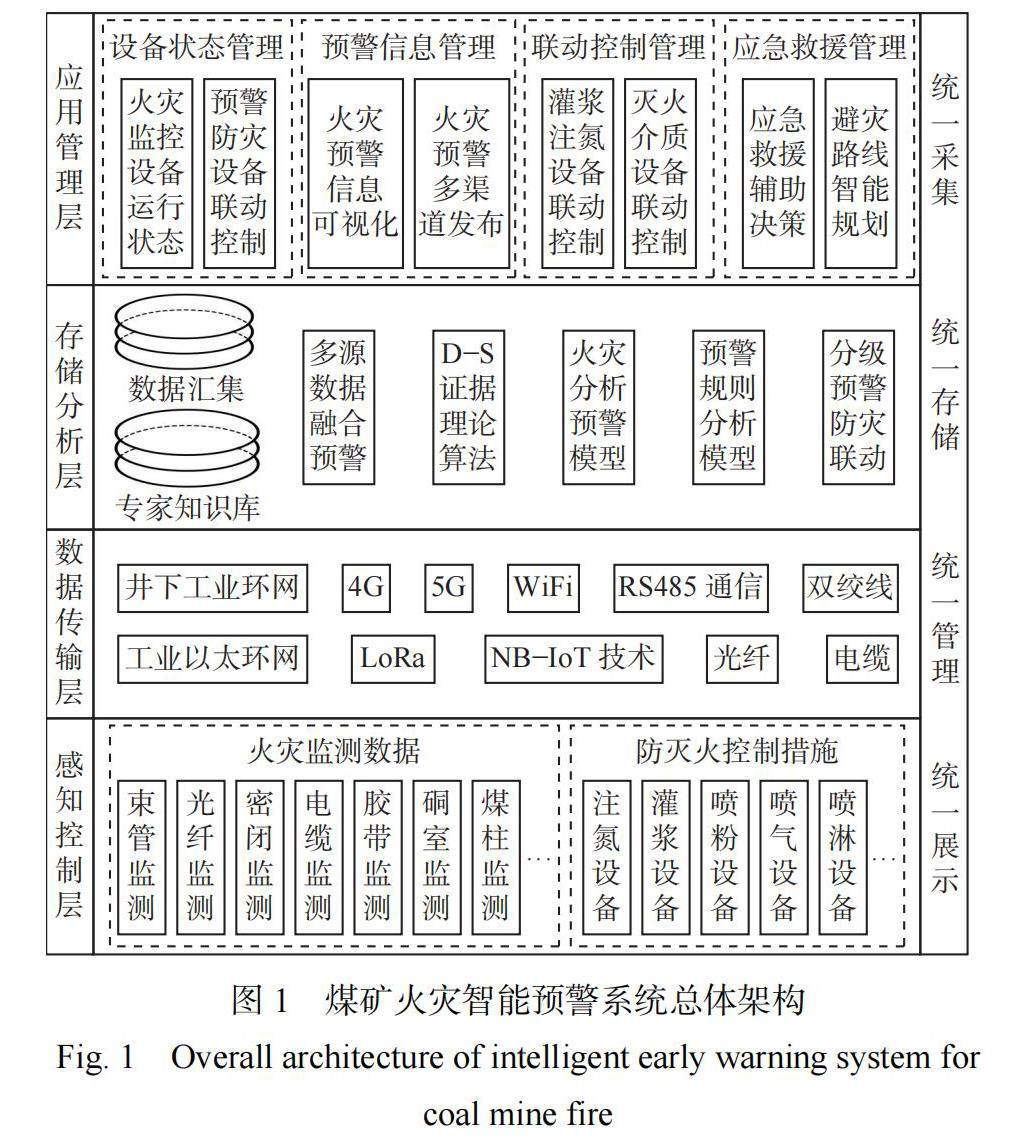
科研成果 | 煤矿火灾智能预警系统研发与应用
科研成果 | 煤矿火灾智能预警系统研发与应用
-
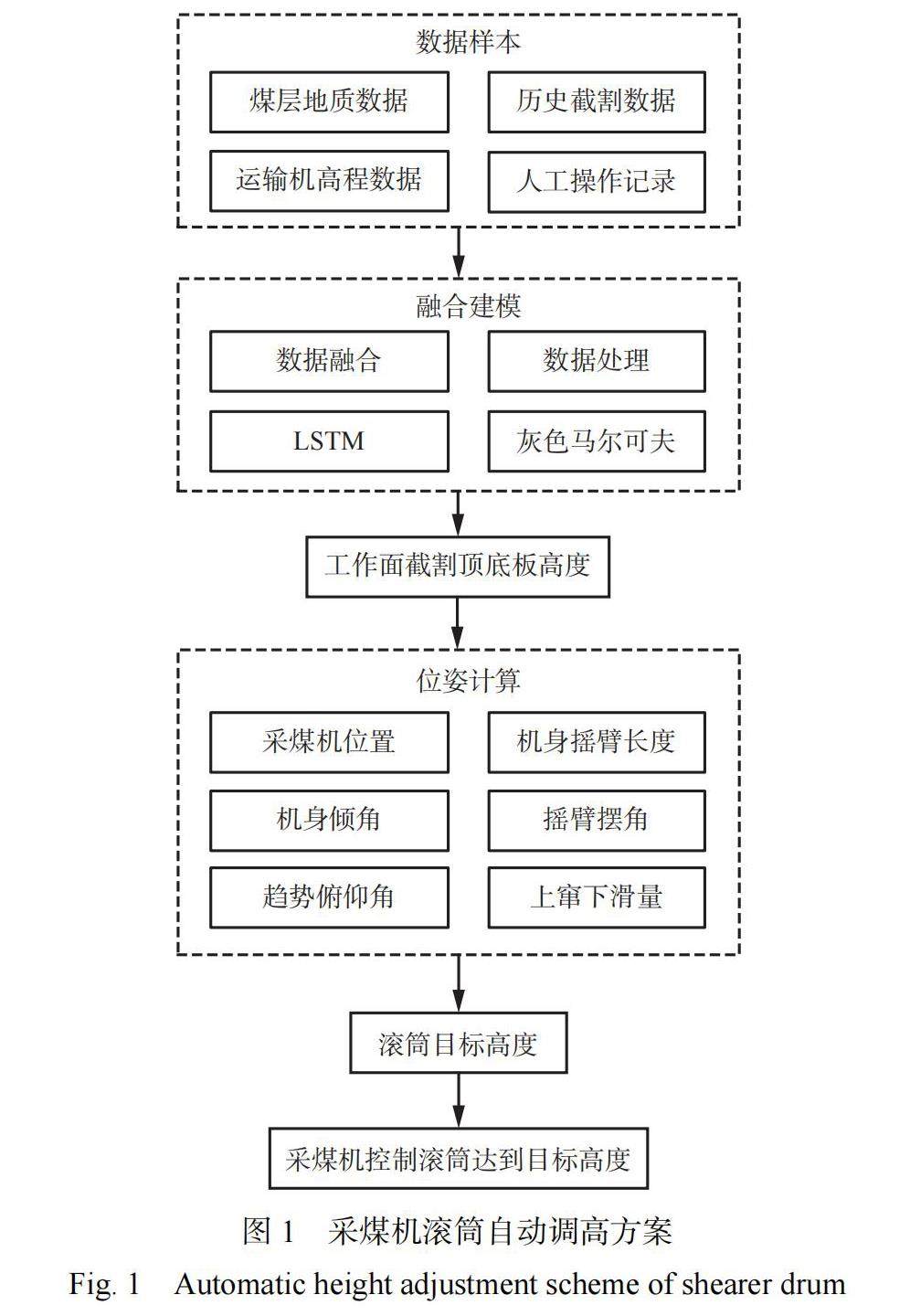
科研成果 | 基于截割顶底板高度预测模型的采煤机自动调高技术
科研成果 | 基于截割顶底板高度预测模型的采煤机自动调高技术
-
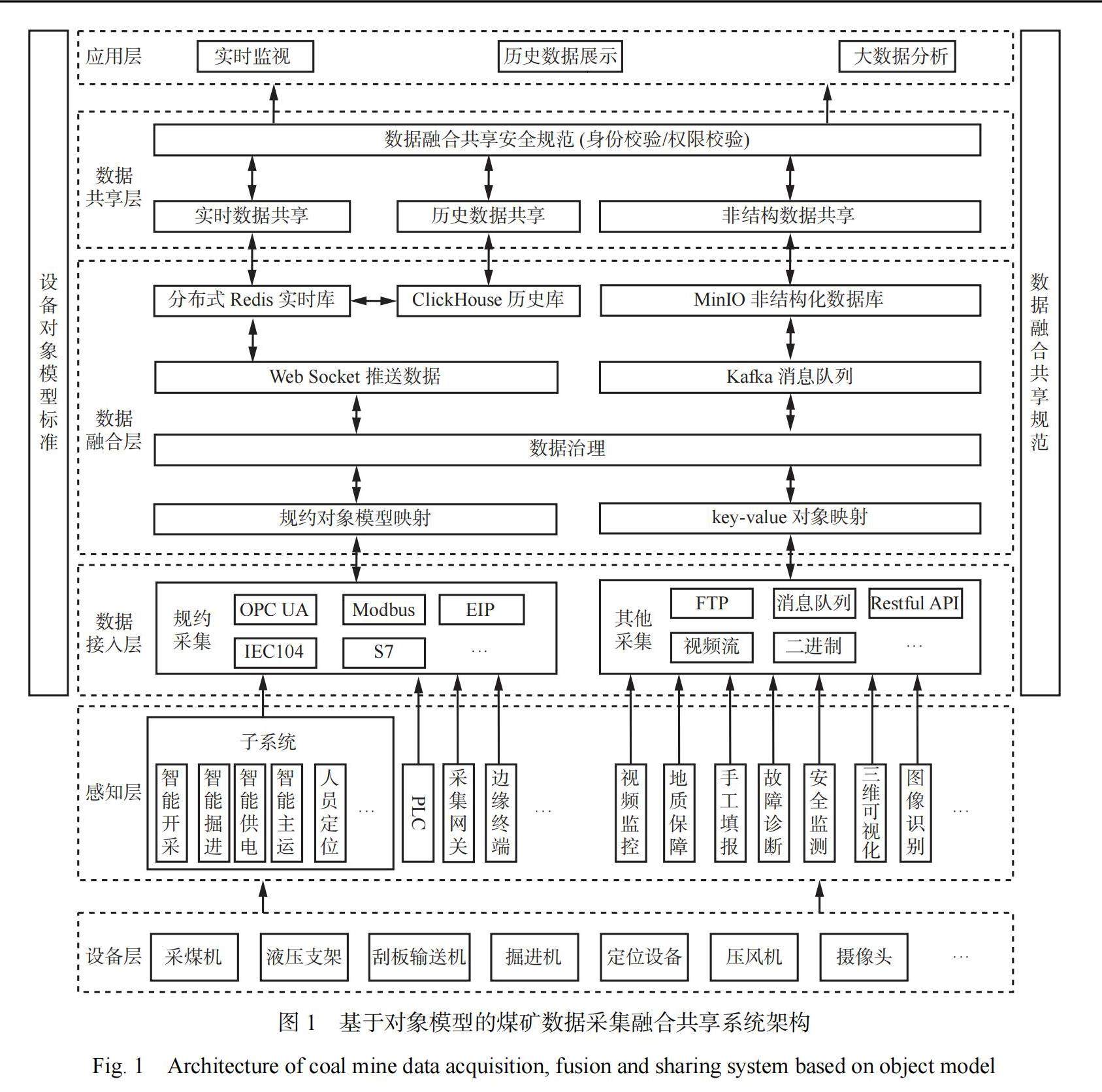
科研成果 | 基于对象模型的煤矿数据采集融合共享系统
科研成果 | 基于对象模型的煤矿数据采集融合共享系统
-

科研成果 | 基于5G+UWB和惯导技术的井下人员定位系统
科研成果 | 基于5G+UWB和惯导技术的井下人员定位系统
-
科研成果 | 水力压冲一体化增透抽采瓦斯技术
科研成果 | 水力压冲一体化增透抽采瓦斯技术
-
综述 | 基于电磁波的煤岩识别技术研究进展
综述 | 基于电磁波的煤岩识别技术研究进展
-
分析与研究 | 基于双曲嵌入的露天矿区暗光环境下道路多目标检测模型
分析与研究 | 基于双曲嵌入的露天矿区暗光环境下道路多目标检测模型
-
分析与研究 | 基于跨模态注意力融合的煤炭异物检测方法
分析与研究 | 基于跨模态注意力融合的煤炭异物检测方法
-
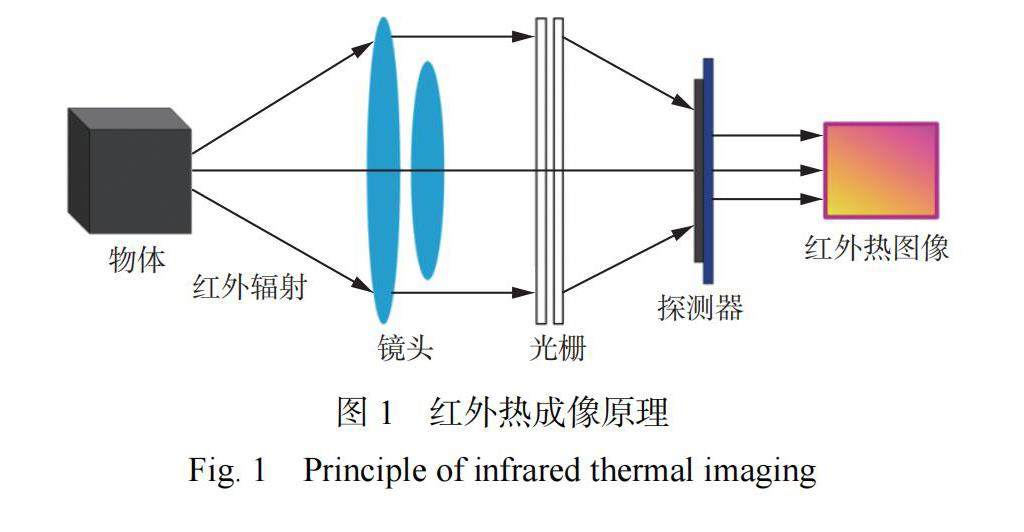
分析与研究 | 基于水传热和红外热成像的煤矸识别方法
分析与研究 | 基于水传热和红外热成像的煤矸识别方法
-

分析与研究 | 综掘工作面风幕阻尘效果影响因素研究
分析与研究 | 综掘工作面风幕阻尘效果影响因素研究
-
分析与研究 | 综掘工作面气室降尘技术研究
分析与研究 | 综掘工作面气室降尘技术研究
-
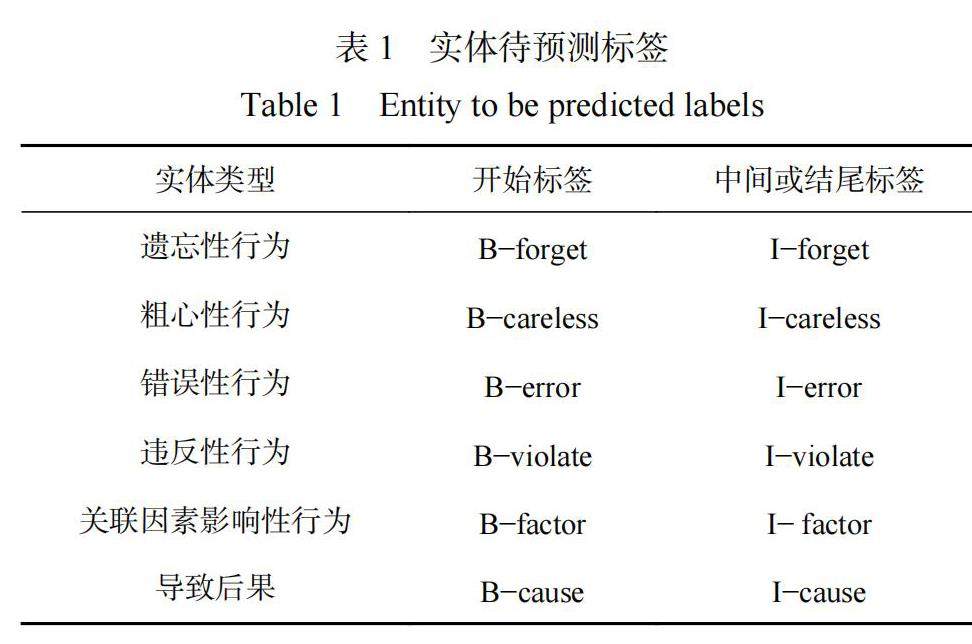
分析与研究 | 基于煤矿井下不安全行为知识图谱构建方法
分析与研究 | 基于煤矿井下不安全行为知识图谱构建方法
-
分析与研究 | 基于深度学习的矿井滚动轴承故障诊断方法
分析与研究 | 基于深度学习的矿井滚动轴承故障诊断方法
-
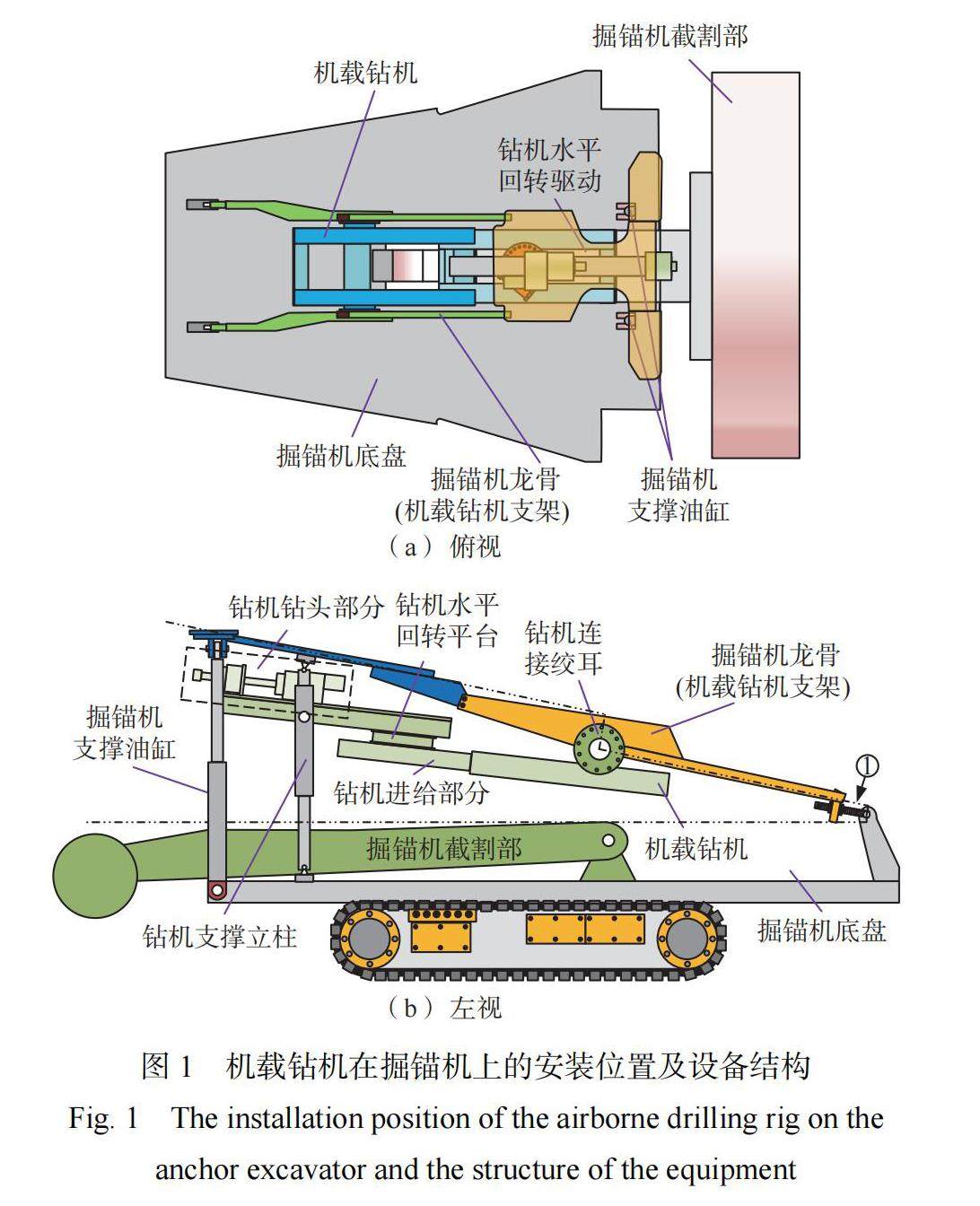
分析与研究 | 掘锚机机载钻机姿态调整分析
分析与研究 | 掘锚机机载钻机姿态调整分析
-
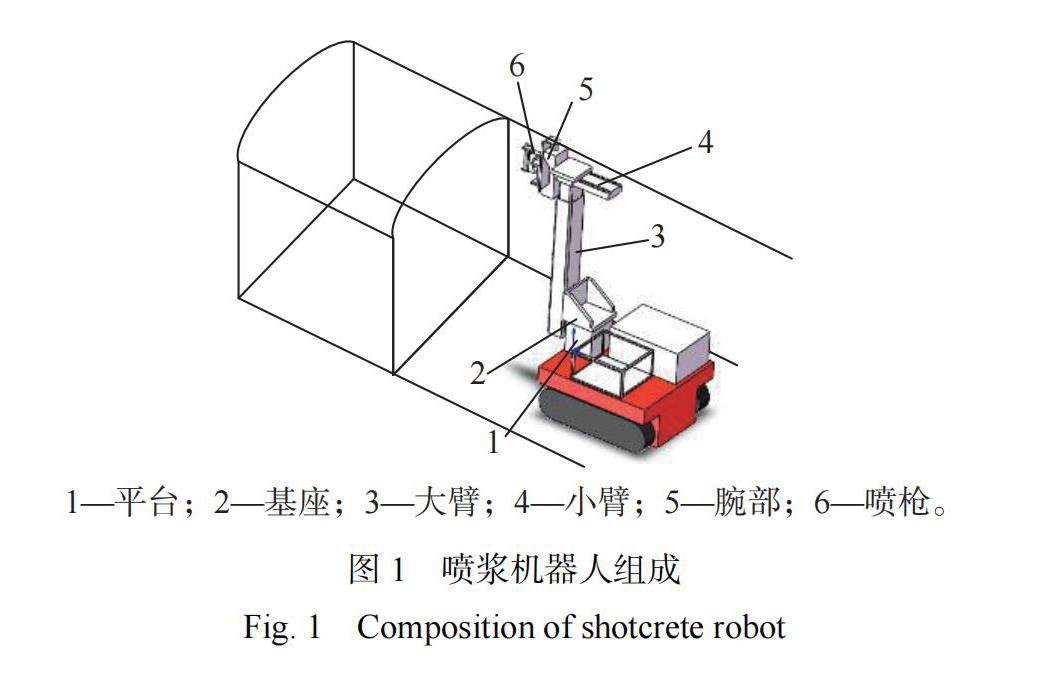
分析与研究 | 煤矿巷道七自由度喷浆机器人轨迹规划与跟踪控制
分析与研究 | 煤矿巷道七自由度喷浆机器人轨迹规划与跟踪控制
-
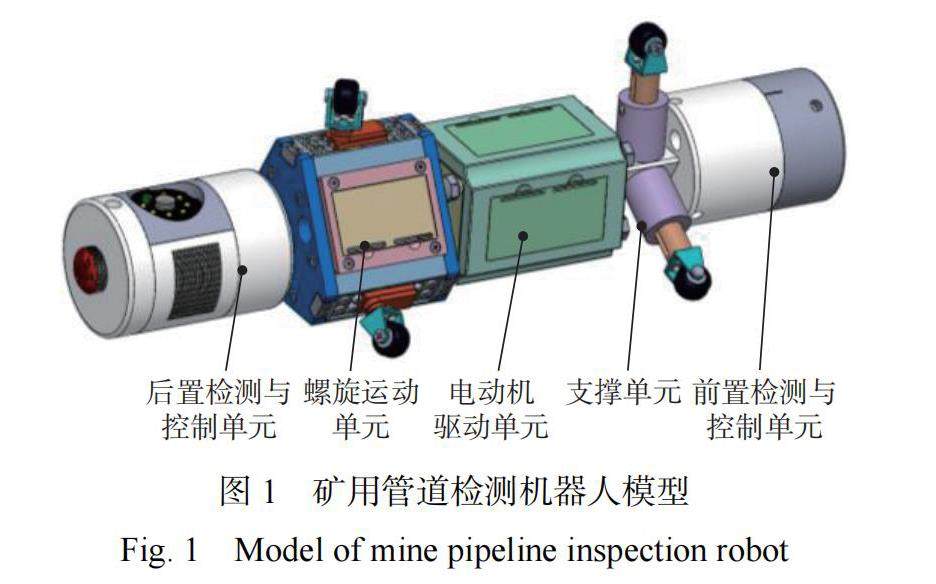
分析与研究 | 一种矿用管道检测机器人设计及牵引性能分析
分析与研究 | 一种矿用管道检测机器人设计及牵引性能分析
-
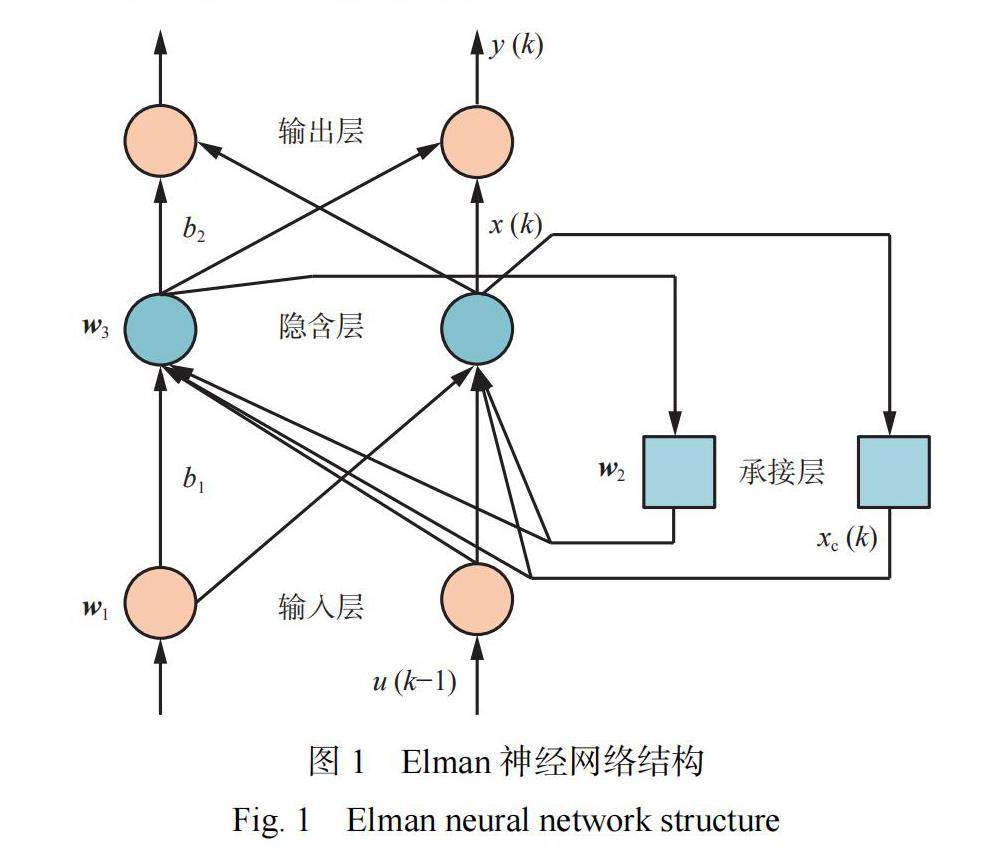
分析与研究 | 基于PSO-Elman神经网络的井底风温预测模型
分析与研究 | 基于PSO-Elman神经网络的井底风温预测模型
-
分析与研究 | 胡家河煤矿综放工作面矿压显现规律预测及主控因素研究
分析与研究 | 胡家河煤矿综放工作面矿压显现规律预测及主控因素研究
-
分析与研究 | 坚硬顶板切顶卸压技术对巷道围岩变形规律影响
分析与研究 | 坚硬顶板切顶卸压技术对巷道围岩变形规律影响
-

分析与研究 | 长焰煤气水相渗特征实验研究
分析与研究 | 长焰煤气水相渗特征实验研究











 登录
登录