
目录
快速导航-
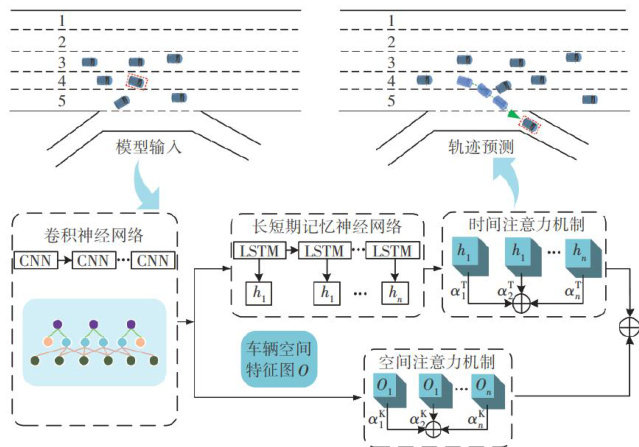
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 基于注意力机制的交织区轨迹预测及应用
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 基于注意力机制的交织区轨迹预测及应用
-

多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 基于深度强化学习与动态运动基元的自动驾驶类人轨迹规划
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 基于深度强化学习与动态运动基元的自动驾驶类人轨迹规划
-

多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 融合改进A*和DWA算法的无人车路径规划研究
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 融合改进A*和DWA算法的无人车路径规划研究
-
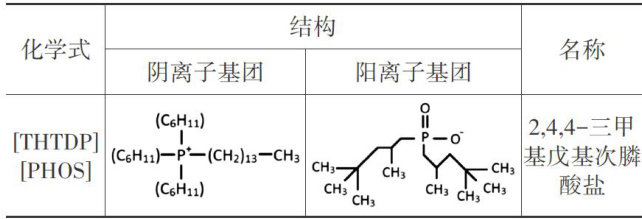
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 高强化条件下离子液体对不同种活塞环-气缸套摩擦磨损性能影响的研究
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 高强化条件下离子液体对不同种活塞环-气缸套摩擦磨损性能影响的研究
-

多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 基于分数阶长相关模型的锂电池容量寿命预测
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 基于分数阶长相关模型的锂电池容量寿命预测
-

多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 基于某车用燃料电池的阳极脉冲引射循环性能仿真分析
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | 基于某车用燃料电池的阳极脉冲引射循环性能仿真分析
-
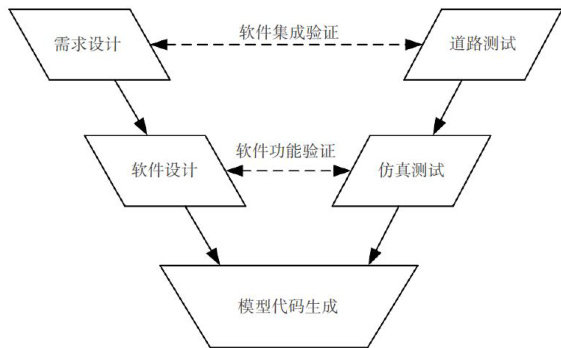
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | WorldSim和LogSim在自动紧急制动系统决策控制软件开发中的应用研究
多模态智能算法融合的自动驾驶轨迹预测与路径规划技术 | WorldSim和LogSim在自动紧急制动系统决策控制软件开发中的应用研究














 登录
登录