
目录
快速导航-

机械基础工程 | 多工况下气体减压阀特性试验研究
机械基础工程 | 多工况下气体减压阀特性试验研究
-

机械基础工程 | 基于反演法的永磁电机定子等效建模方法
机械基础工程 | 基于反演法的永磁电机定子等效建模方法
-

机械基础工程 | 考虑气体溶解和温度的油气悬架输出特性研究
机械基础工程 | 考虑气体溶解和温度的油气悬架输出特性研究
-

机械基础工程 | 基于最优伪维格纳-维尔分布方法的载荷谱编辑研究
机械基础工程 | 基于最优伪维格纳-维尔分布方法的载荷谱编辑研究
-

机械基础工程 | 连续可调行星齿轮超材料非线性动力学
机械基础工程 | 连续可调行星齿轮超材料非线性动力学
-

机械基础工程 | 新型并联复式活齿传动原理及其啮合特性
机械基础工程 | 新型并联复式活齿传动原理及其啮合特性
-

机械基础工程 | 轴向柱塞泵织构化柱塞副低压程润滑特性研究
机械基础工程 | 轴向柱塞泵织构化柱塞副低压程润滑特性研究
-

机械基础工程 | 电脉冲辅助硬车淬硬轴承钢表面摩擦学性能研究
机械基础工程 | 电脉冲辅助硬车淬硬轴承钢表面摩擦学性能研究
-

机械基础工程 | 多孔介质动静压机械密封动力学特性研究
机械基础工程 | 多孔介质动静压机械密封动力学特性研究
-

机械基础工程 | 预变形Jeffcott裂纹转子超谐波共振的动力学响应
机械基础工程 | 预变形Jeffcott裂纹转子超谐波共振的动力学响应
-

机械基础工程 | 基于扰动观测和摩擦补偿的气动摆角伺服系统滑模控制
机械基础工程 | 基于扰动观测和摩擦补偿的气动摆角伺服系统滑模控制
-

机械基础工程 | 基于超声谐振挤压膜效应的触觉纹理动态感知及实验研究
机械基础工程 | 基于超声谐振挤压膜效应的触觉纹理动态感知及实验研究
-

机械基础工程 | 磁悬浮列车随机非线性最优控制研究
机械基础工程 | 磁悬浮列车随机非线性最优控制研究
-

机械基础工程 | 刚度自调谐宽频动力吸振器设计与试验研究
机械基础工程 | 刚度自调谐宽频动力吸振器设计与试验研究
-

机械基础工程 | 压力倍放高精感知机构设计方法研究
机械基础工程 | 压力倍放高精感知机构设计方法研究
-

机械基础工程 | 一种五轴机床旋转轴位置无关几何误差辨识方法
机械基础工程 | 一种五轴机床旋转轴位置无关几何误差辨识方法
-

机械基础工程 | 柔性瓣膜阀锥流道压电泵的设计与试验
机械基础工程 | 柔性瓣膜阀锥流道压电泵的设计与试验
-

机械基础工程 | 基于热网络法的风电机组主轴承温度场分析
机械基础工程 | 基于热网络法的风电机组主轴承温度场分析
-

机械基础工程 | 变排量对置柱塞泵流通特性研究
机械基础工程 | 变排量对置柱塞泵流通特性研究
-

机械基础工程 | 基于视觉检测技术和仿形设计的导电滑环轴向接触位置测试方法
机械基础工程 | 基于视觉检测技术和仿形设计的导电滑环轴向接触位置测试方法
-
机械基础工程 | 考虑冗余自由度的六轴机器人光顺运动路径规划方法
机械基础工程 | 考虑冗余自由度的六轴机器人光顺运动路径规划方法
-

机械基础工程 | 内花键电解整形阴极导流结构优化与试验
机械基础工程 | 内花键电解整形阴极导流结构优化与试验
-

机械基础工程 | 基于音爆测量试验的外式天平及支撑装置研制
机械基础工程 | 基于音爆测量试验的外式天平及支撑装置研制
-

机械基础工程 | 一种飞行器口盖连接的柔性楔块机构设计与力特性分析及试验
机械基础工程 | 一种飞行器口盖连接的柔性楔块机构设计与力特性分析及试验
-
智能制造 | 新型刚柔混联连续体机器人运动建模
智能制造 | 新型刚柔混联连续体机器人运动建模
-

智能制造 | 基于三维卷积神经网络的微结构性能快速预测
智能制造 | 基于三维卷积神经网络的微结构性能快速预测
-

智能制造 | 凸起凹陷特征表面的机器人变位姿喷涂涂层均匀性优化研究
智能制造 | 凸起凹陷特征表面的机器人变位姿喷涂涂层均匀性优化研究
-
智能制造 | CAD图形制导的汽车轮毂机器人打磨路径生成方法
智能制造 | CAD图形制导的汽车轮毂机器人打磨路径生成方法
-
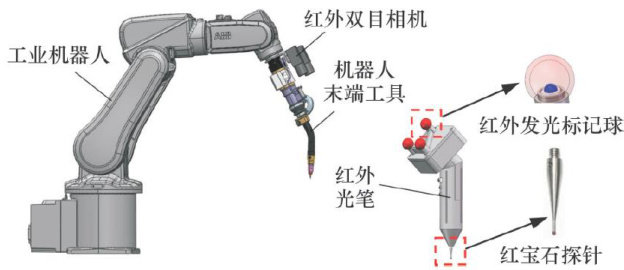
智能制造 | 基于6D光笔的工业机器人高精度示教方法
智能制造 | 基于6D光笔的工业机器人高精度示教方法
-

智能制造 | 基于空间注意力机制U-Net的铣刀磨损在位监测方法
智能制造 | 基于空间注意力机制U-Net的铣刀磨损在位监测方法
-

智能制造 | 基于工艺数据规范表达的工艺知识泛化
智能制造 | 基于工艺数据规范表达的工艺知识泛化
-

智能制造 | 基于网格特征的自动排牙方法
智能制造 | 基于网格特征的自动排牙方法
-

先进材料加工工程 | 基于多源信息融合的超大型环件轧制过程几何形状分阶段测量模型和方法
先进材料加工工程 | 基于多源信息融合的超大型环件轧制过程几何形状分阶段测量模型和方法
-

先进材料加工工程 | Ti2AINb基合金热变形行为及加工图研究
先进材料加工工程 | Ti2AINb基合金热变形行为及加工图研究
-

工程前沿 | 船用醇柴双燃料发动机推进特性试验研究
工程前沿 | 船用醇柴双燃料发动机推进特性试验研究
-
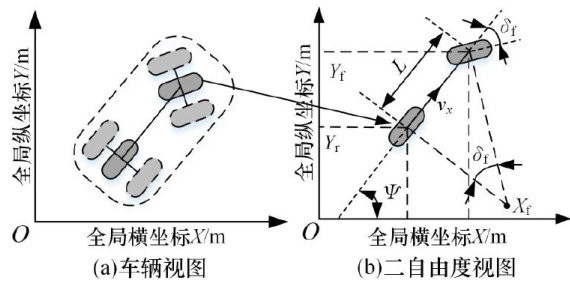
工程前沿 | 融合道路曲率前馈的车辆横向控制策略
工程前沿 | 融合道路曲率前馈的车辆横向控制策略
-
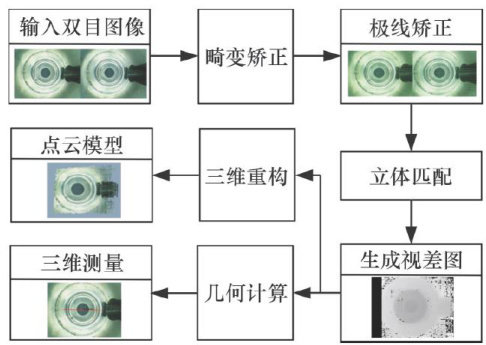
工程前沿 | 多线程半全局立体匹配工件内部检测方法
工程前沿 | 多线程半全局立体匹配工件内部检测方法
-

工程前沿 | 车门限位多自由度激励的刚柔耦合识别及关门窗框抖动优化
工程前沿 | 车门限位多自由度激励的刚柔耦合识别及关门窗框抖动优化
-

工程前沿 | 斜逆断层作用下的油气管道应变极值表征方法
工程前沿 | 斜逆断层作用下的油气管道应变极值表征方法
 和阻尼系数 dzz,dαα,dββ 为代价。
和阻尼系数 dzz,dαα,dββ 为代价。











 登录
登录